Chapter 3 : Memory Management¶
메모리 관리는 커널에서 가장 복잡하면서도 동시에 가장 중요한 부분 중 하나입니다. 수행할 작업을 수행하려면 프로세서와 커널이 매우 긴밀하게 협력해야 하기 때문에 프로세서와 커널 간의 협력이 강력히 요구되는 것이 특징입니다. 1장에서는 메모리 관리 구현 시 커널이 사용하는 다양한 기술과 추상화에 대한 간략한 개요를 제공했습니다. 이 장에서는 구현의 기술적 측면을 자세히 검토합니다. 3.1 Overview ==========
메모리 관리 구현은 다양한 영역을 다룹니다. 메모리의 물리적 페이지 관리.
메모리를 큰 덩어리로 할당하는 버디 시스템입니다. 더 작은 메모리 청크를 할당하기 위한 slab, slub 및 slob 할당자. 비연속적인 메모리 블록을 할당하는 vmalloc 메커니즘입니다. 프로세스의 주소 공간
우리가 알고 있듯이 프로세서의 가상 주소 공간은 일반적으로 Linux 커널에 의해 두 부분으로 나뉩니다. 아래쪽과 큰 부분은 사용자 프로세스에 사용 가능하고 위쪽 부분은 커널용으로 예약되어 있습니다. 하위 부분은 컨텍스트 전환(두 사용자 프로세스 간) 중에 수정되는 반면, 가상 주소 공간의 커널 부분은 항상 동일하게 유지됩니다. IA-32 시스템에서 주소 공간은 일반적으로 사용자 프로세스와 커널 간에 3:1의 비율로 나뉩니다. 가상 주소 공간이 4GiB인 경우 사용자 공간에는 3GiB, 커널에는 1GiB를 사용할 수 있습니다. 이 비율은 관련 구성 옵션을 수정하여 변경할 수 있습니다. 그러나 이는 매우 특정한 구성 및 애플리케이션에만 이점이 있습니다. 추가 조사를 위해 지금은 비율을 3:1로 가정하지만 나중에 다른 비율로 다시 적용하겠습니다. 사용 가능한 물리적 메모리는 커널의 주소 공간에 매핑됩니다. 따라서 커널 영역 시작까지의 오프셋이 사용 가능한 RAM 크기를 초과하지 않는 가상 주소를 사용한 액세스는 자동으로 물리적 페이지 프레임과 연결됩니다. 메모리 때문에 실용적입니다.
이 체계가 채택되면 커널 영역의 할당은 항상 물리적 RAM에 배치됩니다. 그러나 한 가지 문제가 있습니다. 커널의 가상 주소 공간 부분은 반드시 CPU의 이론상 최대 주소 공간보다 작습니다. 커널 주소 공간에 매핑할 수 있는 것보다 더 많은 물리적 RAM이 있는 경우 커널은 ‘초과잉’’ 메모리를 관리하기 위해 highmem 방법을 사용해야 합니다. IA-32 시스템에서는 최대 896MiB의 RAM을 직접 관리할 수 있습니다. 이 수치를 초과하는 것(최대 4GiB)은 highmem을 통해서만 처리될 수 있습니다.
4GiB 는 32비트 시스템 에서 처리할 수 있는 최대 메모리 크기입니다 (232 = 4GiB ). 트릭을 사용하는 경우 최신 IA-32 구현(Pentium PRO 이상)은 PAE 모드가 활성화된 경우 최대 64GiB의 메모리를 관리할 수 있습니다. PAE는 페이지 주소 확장을 나타내며 메모리 포인터에 대한 추가 비트를 제공합니다. 그러나 64GiB 전체 를 동시에 처리할 수는 없으며 각각 4GiB 의 섹션만 처리할 수 있습니다. 대부분의 메모리 관리 데이터 구조는 0 ~ 1GiB 범위에서만 할당할 수 있으므로 최대 메모리 크기에는 실질적인 제한이 있으며 이는 64GiB 미만입니다 . 정확한 값은 커널 구성에 따라 다릅니다. 예를 들어, highmem에 세 번째 수준의 페이지 테이블 항목을 할당하여 일반 영역의 로드를 줄이는 것이 가능합니다. 4GiB 를 초과하는 메모리를 갖춘 IA-32 시스템은 드물고 모든 실용적인 목적을 위해 IA-32를 대체한 64비트 아키텍처 AMD64가 이 문제에 대한 훨씬 깔끔한 솔루션을 제공하므로 두 번째 하이메모리에 대해서는 굳이 논의하지 않겠습니다. 여기 모드.
물리적 주소 지정이 더 작은 수의 비트(예: 48 또는 52)로 제한되어 있더라도 사용 가능한 주소 공간이 방대하기 때문에 64비트 시스템에서는 Highmem 모드가 필요하지 않습니다. 불과 몇 년 전만 해도 32비트 시스템의 주소 공간이 64비트 시스템의 한계에 도달하는 것은 단지 시간 문제인 것처럼 보일 것이라고 주장할 수 있었지만, 당분간은 16 EiB로 충분할 것 입니다 . 하지만 당신은 결코 알지 못합니다 … .
highmem 페이지 사용은 커널 자체에서만 문제가 됩니다. 커널은 먼저 아래에 설명된 kmap 및 kunmap 함수를 호출하여 highmem 페이지를 사용하기 전에 가상 주소 공간에 매핑해야 합니다. 이는 일반 메모리 페이지에서는 필요하지 않습니다. 그러나 사용자 공간 프로세스의 경우 페이지가 항상 페이지 테이블을 통해 액세스되고 직접적으로 액세스되지 않기 때문에 페이지가 highmem 페이지인지 일반 페이지인지는 전혀 차이가 없습니다.
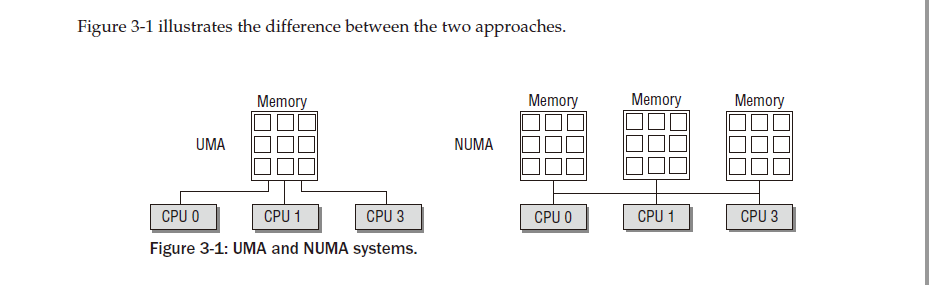
서로 다른 방식으로 물리적 메모리를 관리하는 두 가지 유형의 머신이 있습니다.
1. UMA 시스템 (균일한 메모리 액세스) 은 사용 가능한 메모리를 연속적인 방식으로 구성합니다(작은 간격이 있을 수 있음). 대칭형 다중 프로세서 시스템의 각 프로세서는 각 메모리 영역에 동일하게 빠르게 액세스할 수 있습니다. 2. NUMA 머신 (비균일 메모리 액세스) 은 항상 다중 프로세서 머신입니다. 특히 빠른 액세스를 지원하기 위해 시스템의 각 CPU에 로컬 RAM을 사용할 수 있습니다. 프로세서는 버스를 통해 연결되어 다른 CPU의 로컬 RAM에 대한 액세스를 지원합니다. 이는 당연히 로컬 RAM에 액세스하는 것보다 느립니다. 이러한 시스템의 예로는 IBM의 Alpha 기반 WildFire 서버와 NUMA-Q 시스템이 있습니다.
연속되지 않은 메모리를 사용하는 두 머신 유형을 혼합하는 것도 가능합니다. 이러한 혼합은 RAM이 연속적이지 않지만 큰 구멍이 있는 UMA 시스템을 나타냅니다. 여기서는 NUMA 구성의 원칙을 적용하여 커널에 대한 메모리 액세스를 더 간단하게 만드는 것이 도움이 되는 경우가 많습니다. 실제로 커널은 FLATMEM, DISCONTIGMEM 및 SPARSEMEM의 세 가지 구성 옵션을 구별합니다. SPARSEMEM 과 DISCONTIGMEM은 실질적으로 동일한 목적을 수행하지만 개발자의 관점에서는 코드 품질이 다릅니다. SPARSEMEM은 더 실험적이고 덜 안정적인 것으로 간주되지만 성능 최적화 기능을 제공합니다. 불연속 메모리는 더 안정적인 것으로 추정되지만 메모리 핫플러그와 같은 새로운 기능에는 준비가 되어 있지 않습니다. 다음 섹션에서는 이 메모리 구성 유형이 대부분의 구성에서 사용되고 일반적으로 커널 기본값이기도 하기 때문에 주로 FLATMEM 으로 제한합니다. 모든 메모리 모델이 실질적으로 동일한 데이터 구조를 사용하기 때문에 다른 옵션을 논의하지 않는다는 사실은 큰 손실이 아닙니다. 실제 NUMA 시스템은 구성 옵션 CONFIG_NUMA를 설정하며 메모리 관리 코드는 두 변형 간에 다릅니다. 플랫 메모리 모델은 NUMA 시스템에서는 적합하지 않으므로 연속되지 않고 희박한 메모리만 사용할 수 있습니다. 구성 옵션 NUMA_EMU를 사용하면 플랫 메모리가 있는 AMD64 시스템이 메모리를 가짜 NUMA 영역으로 분할하여 NUMA 시스템의 전체 복잡성을 누릴 수 있습니다. 이는 실제 NUMA 머신을 사용할 수 없는 경우 개발에 유용할 수 있습니다. 어떤 이유로든 비용이 많이 드는 경향이 있습니다.
이 책은 UMA 사례에 초점을 맞추고 CONFIG_NUMA를 고려하지 않습니다. 이는 NUMA 데이터 구조를 완전히 무시할 수 있다는 의미는 아닙니다. UMA 시스템은 주소 공간에 큰 홀이 포함된 경우 구성 옵션 CONFIG_DISCONTIGMEM을 선택할 수 있으므로 NUMA 기술을 사용하지 않는 시스템에서도 둘 이상의 메모리 노드를 사용할 수 있습니다.
그림 3-2에는 메모리 레이아웃과 관련된 구성 옵션에 대한 다양한 선택 사항이 요약되어 있습니다. 다음 논의에서 용어 할당 순서를 자주 접하게 될 것입니다 . 메모리 영역에 포함된 페이지 수의 이진 로그를 나타냅니다. 순서 0 할당은 한 페이지, 순서 2 할당은 21 = 2 페이지, 순서 3 할당은 22 = 4 페이지로 구성됩니다.

3.2 Organization in the (N)UMA Model¶
지원되는 다양한 아키텍처는 메모리 관리 방법에 따라 크게 다릅니다. 커널의 지능적인 설계와 어떤 경우에는 호환성 계층 사이에 있기 때문에 이러한 차이점은 너무 잘 숨겨져 일반 코드에서는 일반적으로 이를 무시할 수 있습니다. 1장에서 설명한 것처럼 주요 문제는 페이지 테이블의 간접 참조 수준 수가 다양하다는 것입니다. 두 번째 핵심 측면은 NUMA와 UMA 시스템으로의 분할입니다.
커널은 균일하고 균일하지 않은 메모리 액세스를 가진 시스템에 대해 동일한 데이터 구조를 사용하므로 개별 알고리즘은 다양한 형태의 메모리 배열을 거의 또는 전혀 구별할 필요가 없습니다. UMA 시스템에서는 전체 시스템 메모리를 관리하는 데 도움이 되는 단일 NUMA 노드가 도입되었습니다. 메모리 관리의 다른 부분은 의사 NUMA 시스템으로 작업하고 있다고 믿게 됩니다.
3.2.1 Overview¶
커널에서 메모리를 구성하는 데 사용되는 데이터 구조를 살펴보기 전에 용어가 항상 이해하기 쉽지 않기 때문에 몇 가지 개념을 정의해야 합니다. 먼저 NUMA 시스템을 고려해 보겠습니다. 이를 통해 UMA 시스템으로 축소하는 것이 매우 쉽다는 것을 보여줄 수 있습니다. 그림 3-3은 아래에 설명된 메모리 분할을 그래픽으로 나타낸 것입니다(데이터 구조를 자세히 살펴보면 알 수 있듯이 상황은 다소 단순화되었습니다). 첫째, RAM 메모리는 노드로 구분됩니다 . 노드는 시스템의 각 프로세서와 연관되어 있으며 커널에서 pg_data_t 의 인스턴스로 표시됩니다 (이러한 데이터 구조는 곧 정의됩니다). 각 노드는 메모리를 더 세분화하여 영역 으로 분할됩니다 . 예를 들어, DMA 작업(ISA 장치의 경우)에 사용할 수 있는 메모리 영역에 대한 제한이 있습니다. 처음 16MiB만 적합합니다. 직접 매핑할 수 없는 highmem 영역도 있습니다. 이들 사이에는 보편적으로 사용되는 ‘일반’ 메모리 영역이 있습니다. 따라서 노드는 최대 3개의 영역으로 구성됩니다. 커널은 이들을 구별하기 위해 다음과 같은 상수를 도입합니다.

커널은 시스템의 모든 영역을 열거하기 위해 다음 상수를 도입합니다.
<mmzone.h> enum zone_type { #ifdef CONFIG_ZONE_DMA ZONE_DMA, #endif #ifdef CONFIG_ZONE_DMA32 ZONE_DMA32, #endif ZONE_NORMAL, #ifdef CONFIG_HIGHMEM ZONE_HIGHMEM, #endif ZONE_MOVABLE, MAX_NR_ZONES };
DMA에 적합한 메모리의 경우 ZONE_DMA입니다 . 이 영역의 크기는 프로세서 유형에 따라 다릅니다. IA-32 시스템에서 제한은 고대 ISA 장치에 의해 부과된 기존 16MiB 경계입니다. 그러나 더 현대적인 기계도 이로 인해 영향을 받을 수 있습니다.
32비트 주소 지정 가능 영역의 DMA 적합 메모리용 ZONE_DMA32 . 분명히 64비트 시스템의 두 DMA 대안 간에는 차이 점만 있습니다. 32비트 시스템에서는 이 영역이 비어 있습니다. 즉, 크기는 0MiB입니다. 예를 들어 Alphas 및 AMD64 시스템에서 이 영역의 범위는 0~4GiB입니다.
커널 세그먼트에 직접 매핑된 일반 메모리의 경우 ZONE_NORMAL입니다 . 이는 모든 아키텍처에 존재할 수 있다고 보장 되는 유일한 영역입니다. 그러나 해당 영역에 메모리가 반드시 장착되어야 한다는 보장은 없습니다. 예를 들어 AMD64 시스템에 2GiB RAM이 있는 경우 모든 RAM은 ZONE_DMA32 에 속 하고 ZONE_NORMAL은 비어 있습니다.
ZONE_HIGHMEM은 커널 세그먼트 이상으로 확장되는 물리적 메모리용입니다.
컴파일 시간 구성에 따라 일부 영역을 고려할 필요가 없습니다. 예를 들어 64비트 시스템에는 높은 메모리 영역이 필요하지 않으며 DMA32 영역은 최대 4GiB의 메모리에만 액세스할 수 있는 32비트 주변 장치도 지원하는 64비트 시스템에만 필요합니다.
커널은 물리적 메모리의 조각화를 방지하기 위해 노력할 때 필요한 의사 영역 ZONE_MOVABLE을 추가로 정의합니다. 우리는 섹션 3.5.2에서 이 메커니즘을 자세히 살펴볼 것입니다. MAX_NR_ZONES는 커널이 시스템에 존재하는 모든 영역을 반복하려는 경우 종료 마커 역할을 합니다. 각 영역은 해당 영역에 속하는 물리적 메모리 페이지( 커널에서 페이지 프레임 이라고 함)가 구성되는 배열과 연결됩니다 . 필요한 관리 데이터가 있는 구조체 페이지 의 인스턴스가 각 페이지 프레임에 할당됩니다. 노드는 커널이 노드를 탐색할 수 있도록 단일 연결 리스트에 보관됩니다. 성능상의 이유로 커널은 항상 현재 실행 중인 CPU와 연결된 NUMA 노드에서 프로세스의 메모리 할당을 수행하려고 시도합니다. 그러나 이것이 항상 가능한 것은 아닙니다. 예를 들어 노드가 이미 가득 찼을 수 있습니다. 이러한 상황에서는 각 노드가 대체 목록을 제공합니다(struct zonelist의 도움으로 ). 목록에는 메모리 할당의 대안으로 사용할 수 있는 다른 노드(및 관련 영역)가 포함되어 있습니다. 목록에서 항목이 뒤로 갈수록 적합성이 떨어지는 것입니다. UMA 시스템의 상황은 어떻습니까? 여기에는 노드가 하나만 있고 다른 노드는 없습니다. 이 노드는 그림에서 회색 배경으로 표시됩니다. 다른 모든 것은 변경되지 않습니다.
3.2.2 Data Structures¶
이제 메모리 관리에 사용되는 다양한 데이터 구조 간의 관계를 설명했으므로 각각의 정의를 살펴보겠습니다.
Node Management¶
pg_data_t 는 노드를 나타내는 데 사용되는 기본 요소이며 다음과 같이 정의됩니다.
<mmzone.h> typedef struct pglist_data {
struct zone node_zones[MAX_NR_ZONES]; struct zonelist node_zonelists[MAX_ZONELISTS]; int nr_zones; struct page node_mem_map; struct bootmem_data *bdata; unsigned long node_start_pfn; unsigned long node_present_pages; / total number of physical pages / unsigned long node_spanned_pages; / total size of physical page range, including holes */ int node_id; struct pglist_data *pgdat_next; wait_queue_head_t kswapd_wait; struct task_struct *kswapd; int kswapd_max_order;
} pg_data_t;
node_zones 는 노드에 있는 영역의 데이터 구조를 보유하는 배열입니다. node_zonelists는 현재 영역에 더 이상 사용 가능한 공간이 없는 경우 메모리 할당에 사용되는 순서대로 대체 노드와 해당 영역을 지정합니다. 노드의 서로 다른 영역 수는 nr_zones에 보관됩니다. node_mem_map은 메모리의 모든 물리적 페이지를 설명하는 데 사용되는 페이지 인스턴스 배열에 대한 포인터입니다. 마디. 여기에는 노드에 있는 모든 영역의 페이지가 포함됩니다. 시스템 부팅 중에 메모리 관리가 초기화되기 전에도 커널에 메모리가 필요합니다. 초기화됩니다(메모리 관리를 초기화하려면 메모리도 예약되어야 함). 이 문제를 해결하기 위해 커널은 섹션 3.4.3에 설명된 부팅 메모리 할당자를 사용합니다. bdata는 부팅 메모리 할당자를 특징짓는 데이터 구조의 인스턴스를 가리킵니다. node_start_pfn 은 NUMA 노드의 첫 번째 페이지 프레임의 논리 번호입니다. 그 페이지 시스템에 있는 모든 노드 의 프레임에는 연속적으로 번호가 지정되며 각 프레임에는 노드에만 고유한 것이 아니라 전역적으로 고유한 번호가 지정됩니다. 첫 번째 페이지 프레임이 0인 노드가 하나만 있기 때문 에 node_start_pfn 은 UMA 시스템에서 항상 0입니다. node_present_pages는 영역의 페이지 프레임 수를 지정하고 node_spanned_pages는 페이지 프레임의 영역 크기를 지정합니다. 실제 페이지 프레임에 의해 지원되지 않는 영역에 구멍이 있을 수 있으므로 이 값은 반드시 node_present_pages 와 동일할 필요는 없습니다 . node_id 는 전역 노드 식별자입니다. 시스템의 모든 NUMA 노드에는 번호가 매겨져 있습니다. 0부터. pgdat_next는 평소와 같이 끝이 표시된 단일 연결 목록에 시스템의 노드를 연결합니다. 널 포인터로. kswapd_wait는 영역 외부에서 프레임을 교환할 때 필요한 스왑 데몬에 대한 대기 대기열입니다 (이 내용은 18장에서 자세히 다룹니다). kswapd는 영역을 담당하는 스왑 데몬의 작업 구조를 가리킵니다. kswapd_max_order는 해제할 영역의 크기를 정의하기 위해 스와핑 하위 시스템의 구현에 사용되며 현재는 관심이 없습니다.
노드와 노드가 포함하는 영역과 그림 3-3에 표시된 대체 목록 간의 연결은 데이터 구조 시작 부분의 배열을 통해 설정됩니다.
이는 배열에 대한 일반적인 포인터가 아닙니다. 배열 데이터는 노드 구조 자체에 보관됩니다.
노드의 영역은 node_zones[MAX_NR_ZONES]에 보관됩니다. 노드에 더 적은 영역이 있는 경우에도 어레이에는 항상 3개의 항목이 있습니다. 후자의 경우 나머지 항목은 null 요소로 채워집니다.
노드 상태 관리 시스템에 노드가 두 개 이상 존재할 수 있는 경우 커널은 각 노드에 대한 상태 정보를 제공하는 비트맵을 유지합니다. 상태는 비트마스크를 사용하여 지정되며 다음 값이 가능합니다. <nodemask.h> enum node_states {
N_POSSIBLE, /* The node could become online at some point / N_ONLINE, / The node is online / N_NORMAL_MEMORY, / The node has regular memory */
- #ifdef CONFIG_HIGHMEM
- N_HIGH_MEMORY, /* The node has regular or high memory / #else N_HIGH_MEMORY = N_NORMAL_MEMORY, #endif N_CPU, / The node has one or more cpus */ NR_NODE_STATES
};
CPU 및 메모리 핫플러깅에는 N_POSSIBLE, N_ONLINE 및 N_CPU 상태 가 필요하지만이 책에서는 기능을 고려하지 않습니다. 메모리 관리에 필수적인 플래그는 N_HIGH_MEMORY 입니다. 및 N_NORMAL_MEMORY. 첫 번째는 해당 영역에 다음과 같은 메모리가 장착되어 있다고 발표합니다. 일반 메모리이거나 높은 메모리일 수 있습니다. N_NORMAL_MEMORY 는 높은 메모리가 아닌 메모리가 있는 경우에만 설정됩니다. 노드에서.비트 필드 또는 특정 노드의 비트를 각각 설정하거나 지우기 위해 두 가지 보조 기능이 제공됩니다.
<nodemask.h> void node_set_state(int node, enum node_states state) void node_clear_state(int node, enum node_states state)
또한 for_each_node_state(__node, __state) 매크로는 모든 노드에 대한 반복을 허용합니다. 특정 상태에 있고 for_each_online_node(node)는 모든 활성 노드를 반복합니다. 커널이 단일 노드만 지원하도록 컴파일되면, 즉 플랫 메모리 모델을 사용하면 해당 노드는비트맵이 존재하지 않으며 이를 조작하는 함수는 단순히 수행하는 빈 작업으로 확인됩니다. 아무것도 아님.
Memory Zones¶
커널은 zones 구조를 사용하여 영역을 설명합니다. 이는 다음과 같이 정의됩니다: <mmzone.h> struct zone { /* Fields commonly accessed by the page allocator / unsigned long pages_min, pages_low, pages_high; unsigned long lowmem_reserve[MAX_NR_ZONES]; struct per_cpu_pageset pageset[NR_CPUS]; / * free areas of different sizes / spinlock_t lock; struct free_area free_area[MAX_ORDER]; ZONE_PADDING(_pad1_) / Fields commonly accessed by the page reclaim scanner / spinlock_t lru_lock; struct list_head active_list; struct list_head inactive_list; unsigned long nr_scan_active; unsigned long nr_scan_inactive; unsigned long pages_scanned; / since last reclaim / unsigned long flags; / zone flags, see below / / Zone statistics / atomic_long_t vm_stat[NR_VM_ZONE_STAT_ITEMS]; int prev_priority; ZONE_PADDING(_pad2_) / Rarely used or read-mostly fields / wait_queue_head_t * wait_table; unsigned long wait_table_hash_nr_entries; unsigned long wait_table_bits; / Discontig memory support fields. / struct pglist_data *zone_pgdat; unsigned long zone_start_pfn; unsigned long spanned_pages; / total size, including holes / unsigned long present_pages; / amount of memory (excluding holes) / / * rarely used fields: */ char *name; } ____cacheline_maxaligned_in_smp;
이 구조의 눈에 띄는 측면은 ZONE_PADDING으로 구분된 여러 섹션으로 나누어져 있다는 것입니다 . 이는 영역 구조에 매우 자주 액세스되기 때문입니다. 다중 프로세서 시스템에서는 일반적으로서로 다른 CPU가 동시에 구조 요소에 액세스하려고 시도하는 경우가 발생합니다. 자물쇠(에서 조사됨따라서 5장)은 서로 간섭하고 오류가 발생하는 것을 방지하는 데 사용됩니다.불일치. 구조의 두 스핀록( zone->lock 및 zone->lru_lock )은 종종커널이 구조에 매우 자주 액세스하기 때문에 획득됩니다.1 데이터는 CPU 캐시에 보관되어 더 빠르게 처리됩니다. 캐시는 라인으로 구분되며,각 라인은 다양한 메모리 영역을 담당합니다. 커널은 ZONE_PADDING 매크로를 호출하여각 잠금이 자체 캐시 라인에 있는지 확인하기 위해 구조에 추가되는 ‘패딩’’을 생성합니다. 최적의 캐시를 달성하기 위해 컴파일러 키워드 __cacheline_maxaligned_in_smp 도 사용됩니다. 조정. 구조의 마지막 두 섹션도 패딩으로 서로 분리됩니다. 둘 다 포함하지 않음잠금의 주요 목적은 빠른 액세스를 위해 데이터를 캐시 라인에 유지하여RAM 메모리에서 데이터를 로드해야 하는데 이는 느린 프로세스입니다. 이로 인해 크기가 증가함패딩 구조는 무시할 수 있습니다. 특히 영역 구조의 인스턴스가 상대적으로 적기 때문입니다. 커널 메모리. 구조 요소의 의미는 무엇입니까? 메모리 관리는 커널의 복잡하고 포괄적인 부분이기 때문에 이 시점에서 모든 요소의 정확한 의미를 다루는 것은 불가능합니다. 이 장과 다음 장의 일부는 관련 데이터 구조를 이해하는 데 전념할 것입니다.그리고 메커니즘. 그러나 제가 제공할 수 있는 것은 제가 겪고 있는 문제를 맛보게 해주는 개요입니다. 논의할 예정입니다. 그럼에도 불구하고 많은 수의 전방 참조는 불가피합니다.
페이지가 교체될 때 페이지_분, 페이지_하이 및 페이지_로우가 ‘워터마크’로 사용됩니다.
사용 가능한 RAM 메모리가 부족한 경우 커널은 하드 디스크에 페이지를 쓸 수 있습니다. 이 세 가지 요소는 스와핑 데몬의 동작에 영향을 미칩니다. page_high 보다 많은 페이지가 사용 가능하면 영역 상태가 이상적입니다. 사용 가능한 페이지 수 가 page_low 아래로 떨어지면 커널은 페이지를 다른 페이지로 교체하기 시작합니다. 하드 디스크. 사용 가능한 페이지 수가 page_min 미만이면 페이지 회수에 대한 부담이 커집니다. 해당 영역에 여유 페이지가 긴급하게 필요하기 때문에 증가했습니다. 18장에서는 완화를 찾기 위한 커널의 다양한 수단에 대해 논의할 것입니다. 이러한 워터마크의 중요성은 주로 18장에 표시되지만 섹션 3.5.5에서도 적용됩니다. lowmem_reserve 배열은 어떤 상황에서도 실패해서는 안 되는 중요한 할당을 위해 예약된 각 메모리 영역에 대해 여러 페이지를 지정합니다. 각 영역은 그 중요성에 따라 기여합니다. 개별 기여도를 계산하는 알고리즘은 섹션 3.2.2에서 논의됩니다.
이지 세트 는 CPU별 핫 앤 콜드 페이지 목록을 구현하기 위한 배열입니다. 커널은 이러한 목록을 사용하여 구현을 만족시키는 데 사용할 수 있는 새로운 페이지를 저장합니다. 그 러나 캐시 상태로 구분됩니다. 여전히 캐시 핫 상태일 가능성이 높으므로 빠르게 액세스할 수 있는 페이지는 캐시 콜드 페이지와 구분됩니다. 다음 섹션에서는 이 동작을 실현하는 데 사용되는 struct per_ cpu_pageset 데이터 구조에 대해 설명합니다. free_area는 버디 시스템을 구현하는 데 사용되는 동일한 이름의 데이터 구조 배열입니다. 각 배열 요소는 고정된 크기의 연속 메모리 영역을 나타냅니다. 각 영역에 포함된 여유 메모리 페이지 관리는 free_area부터 시작됩니다 . 사용된 데이터 구조는 자체적으로 논의할 가치가 있으며 섹션 3.5.5에서는 버디 시스템의 구현 세부 사항을 심층적으로 다룹니다.
두번째 섹션의 요소는 활동에 따라 영역에서 사용되는 페이지를 분류하는 역할을 합니다. 자주 액세스되는 페이지는 커널에 의해 활성 페 이지로 간주됩니다 . 비활성 페이지는 분명히 그 반대입니다. 이러한 구별은 페이지를 교체해야 할 때 중요합니다. 가능하다면 자주 사용하는 페이지는 그대로 두어야 하지만 불필요한 비활성 페이지는 처벌 없이 교체될 수 있습니다.
다음 요소가 관련됩니다.
tive_list는 활성 페이지를 수집하고 inactive_list는 비활성 페이지 (페이지 인스턴스). nr_scan_active 및 nr_scan_inactive는 메모리를 회수할 때 스캔할 활성 및 비활성 페이지 수를 지정합니다. Pages_scanned는 페이지가 마지막으로 교체된 이후 스캔에 실패한 페성 및 비활성 페이지 수를 지정합니다. 플래그는 영역의 현재 상태를 설명합니다. 다음 플래그가 허용됩니다. <mmzone.h> typedef enum { ZONE_ALL_UNRECLAIMABLE, /* all pages pinned / ZONE_RECLAIM_LOCKED, / prevents concurrent reclaim / ZONE_OOM_LOCKED, / zone is in OOM killer zonelist */ } zone_flags_t; 또한 이러한 플래그 중 어느 것도 설정되지 않을 수도 있습니다. 이는 해당 영역의 정상적인 상태입니다. ZONE_ALL_UNRECLAIMABLE 은 커널이 존의 일부 페이지를 재사용하려고 할 때 (페이지 회수, 18장 참조) 발생할 수 있는 상태이지만 모든 페이지가 고정되어 있기 때문에 전혀 가능하지 않습니다 . 예를 들어, 사용자 공간 애플리케이션은 mlock 시스템 호출을 사용하여 페이지를 교체하는 등의 방법으로 페이지를 물리적 메모리에서 제거해서는 안 된다는 것을 커널에 지시할 수 있습니다. 이러한 페이지가 고정되어 있다고 합니다. 영역의 모든 페이지에 이러한 문제가 발생하면 영역을 회수할 수 없으며 플래그가 설정됩니다. 시간을 낭비하지 않기 위해 스와핑 데몬은 회수할 페이지를 찾을 때 이러한 종류의 영역을 아주 잠깐 스캔합니다. SMP 시스템에서는 여러 CPU가 동시에 영역을 회수하려는 유혹을 받을 수 있습니다. ZONE_RECLAIM_LOCKED 플래그는 이를 방지합니다. CPU가 영역을 회수하는 경우 플래그를 설정합니다. 이렇게 하면 다른 CPU가 시도하는 것을 방지할 수 있습니다. ZONE_OOM_LOCKED 는 불행한 상황을 위해 예약되어 있습니다. 프로세스가 너무 많은 메모리를 사용하여 필수 작업을 더 이상 완료할 수 없는 경우 커널은 더 많은 여유 페이지를 얻기 위해 최악의 메모리 먹는 사람을 선택하고 이를 종료하려고 시도합니다. 이 플래그는 이 경우 여러 CPU가 방해가 되는 것을 방지합니다. 커널은 영역 플래그를 테스트하고 설정하기 위한 세 가지 보조 기능을 제공합니다. <mmzone.h> void zone_set_flag(struct zone *zone, zone_flags_t flag) int zone_test_and_set_flag(struct zone *zone, zone_flags_t flag) void zone_clear_flag(struct zone *zone, zone_flags_t flag)
zone_set_flag 및 zone_clear_flag는 각각 특정 플래그를 설정하고 삭제합니다. zone_test_ and_set_flag는 먼저 주어진 플래그가 설정되어 있는지 테스트하고 그렇지 않으면 그렇게 합니다. 플래그의 이전 상태가 호출자에게 반환됩니다.
vm_stat는 영역에 대한 수많은 통계 정보를 보관합니다. 여기에 보관된 대부분의 정보는 현재로서는 그다지 의미가 없으므로 자세한 논의는 섹션 17.7.1에 서 연기됩니다. 지금은 정보가 커널 전체에서 업데이트된다는 점만 알아도 충분합니다. 보 조 함수 zone_page_state를 사용하면 vm_stat 의 정보를 읽을 수 있습니다 . <vmstat.h> static inline unsigned long zone_page_state(struct zone *zone, enum zone_stat_item item)
예를 들어 항목은 위에서 설명한 active_list 및 inactive_list 에 저장된 활성 및 비활성 페이지 수를 쿼리하기 위해 NR_ACTIVE 또는 NR_INACTIVE 일 수 있습니다. 영역의 사용 가능한 페이지 수는 NR_FREE_PAGES를 통해 얻습니다.
prev_priority는 try_to_free_pages 에서 충분한 페이지 프레임이 해제될 때까지 마지막 검색 작업에서 영역을 검 색한 우선 순위를 저장합니다 (17장 참조). 17장에서도 볼 수 있듯이 매핑된 페이지를 교체할지 여부에 대한 결정은 이 값에 따라 달라집니다.
wait_table, wait_table_bits 및 wait_table_hash_nr_entries는 페이지가 사용 가능해질 때까지 기다리는 프로 세스에 대한 대기 대기열을 구현합니다. 이 메커니즘의 세부 사항은 14장에 나와 있지만 직관적인 개념은 꽤 잘 적용됩니다. 즉, 프로세스는 어떤 조건을 기다리기 위해 줄을 서서 대기합니다. 이 조건이 true가 되면 커널로부터 알림을 받고 작업을 재개할 수 있습니다.
영역과 상위 노드 간의 연결은 zone_pgdat 에 의해 설정 됩니다. pg_list_data 의 해당 인스턴스에 . zone_start_pfn 은 해당 영역의 첫 번째 페이지 프레임 인덱스입니다. 나머지 세 필드는 거의 사용되지 않으므로 데이터 구조의 끝에 배치되었습니다. name 은 영역의 일반적인 이름을 포함하는 문자열입니다. 현재 Normal, DMA 및 HighMem의 세 가지 옵션을 사용할 수 있습니다. spanned_pages는 영역의 총 페이지 수를 지정합니다. 그러나 이미 언급한 것처럼 영역에 작은 구멍이 있을 수 있으므로 모두 사용할 필요는 없습니다. 따라서 추가 카운터 (present_pages) 는 실제로 사용 가능한 페이지 수를 나타냅니다. 일반적으로 이 카운터의 값은spanned_pages의 값과 동일합니다 .
Calculation of Zone Watermarks¶
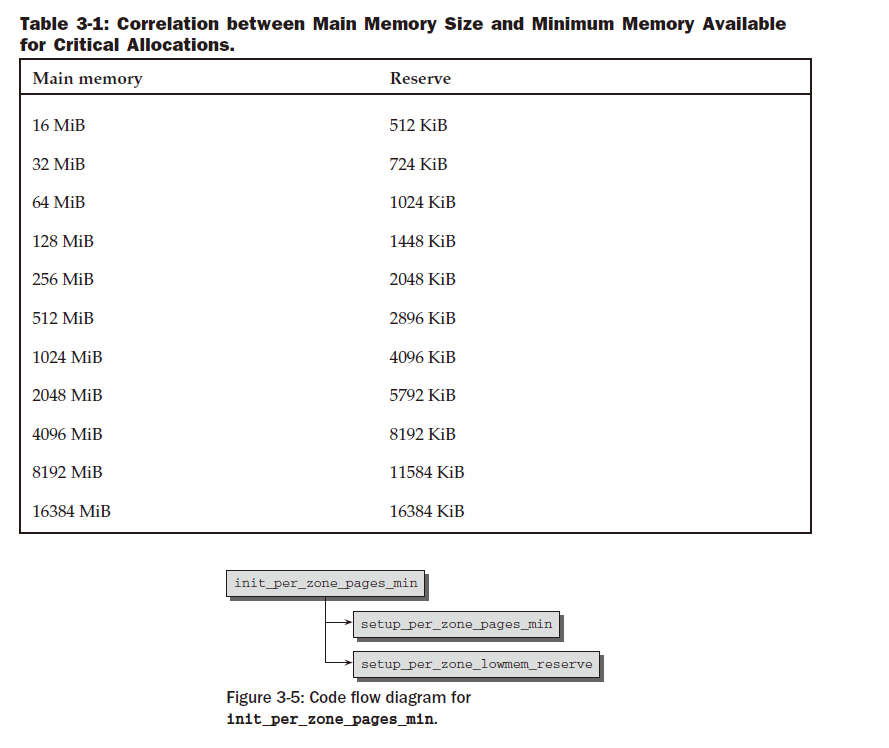
다양한 워터마크를 계산하기 전에 커널은 먼저 중요한 할당을 위해 사용 가능한 최소 메모리 공간을 결정합니다. 이 값은 사용 가능한 RAM 크기에 따라 비선형적으로 확장됩니다. 전역 변수 min_free_kbytes에 저장됩니다 . 그림 3-4는 스케일링 동작에 대한 개요를 제공하며, 메인 그래프와 달리 메인 메모리 크기에 대수 스케일을 사용하지 않는 삽입은 최대 4GiB까지 영역의 확대를 보여줍니다. 데스크탑 환경에서 일반적으로 사용되는 적당한 메모리를 갖춘 시스템의 상황에 대한 느낌을 제공하기 위한 몇 가지 예시적인 값은 표 3-1에 수집되어 있습니다. 128KiB 이상 64MiB 이하를 사용할 수 있다는 점은 변함이 없습니다. 그러나 상한은 매우 만족스러운 양의 주 메모리가 장착된 시스템에서만 필요하다는 점 에 유의하십시오. 3 /proc/sys/vm/min_free_kbytes 파일을 사용 하면 userland에서 값을 읽고 적용할 수 있습니다. 데이터 구조의 워터마크 채우기는 커널 부팅 중에 호출되며 명시적으로 시작할 필요가 없는 init_per_zone_pages_min 에 의해 처리됩니다. 4 setup_per_zone_pages_min은 구조체 영역 의 페이지_분, 페이지_로우 및 페이지_하이 요소를 설정합니다 . highmem 영역 외부의 총 페이지 수가 계산된 후(그리고 lowmem_ 페이지에 저장됨) 커널은 시스템의 모든 영역을 반복하고 다음 계산을 수행합니다.
mm/page_alloc.c void setup_per_zone_pages_min(void) { unsigned long pages_min = min_free_kbytes >> (PAGE_SHIFT - 10); unsigned long lowmem_pages = 0; struct zone *zone; unsigned long flags; … for_each_zone(zone) { u64 tmp; tmp = (u64)pages_min * zone->present_pages; do_div(tmp,lowmem_pages); if (is_highmem(zone)) { int min_pages; min_pages = zone->present_pages / 1024; if (min_pages < SWAP_CLUSTER_MAX) min_pages = SWAP_CLUSTER_MAX; if (min_pages > 128) min_pages = 128; zone->pages_min = min_pages; } else { zone->pages_min = tmp; } zone->pages_low = zone->pages_min + (tmp >> 2); zone->pages_high = zone->pages_min + (tmp >> 1); } }
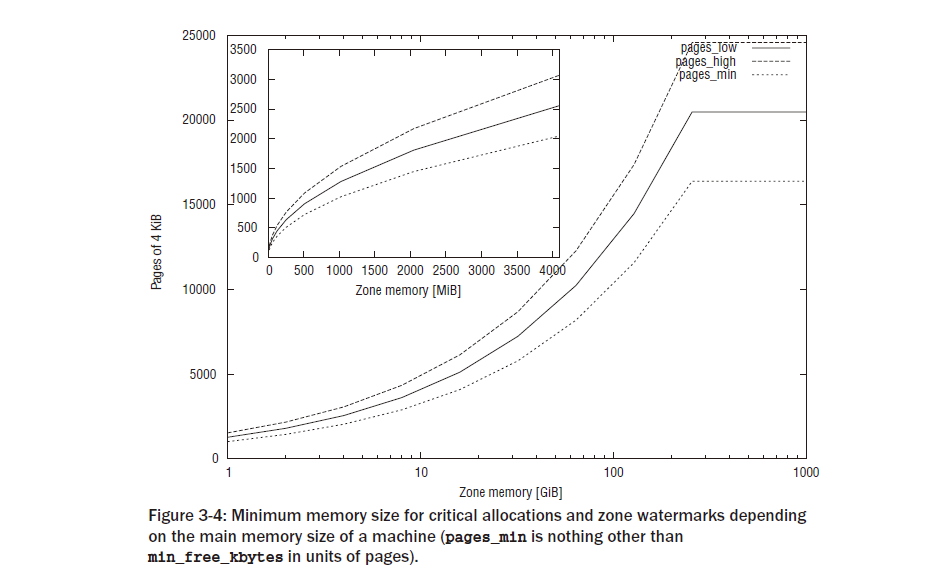
highmem 영역의 하한인 SWAP_CLUSTER_MAX는 전체 페이지에서 중요한 수량입니다. 17장에서 설명한 대로 하위 시스템을 회수합니다. 거기의 코드는 페이지 클러스터에서 배치 방식으로 작동하는 경우가 많습니다. SWAP_CLUSTER_MAX 는 이러한 클러스터의 크기를 정의합니다. 그림 3-4는 다양한 주 메모리 크기에 대한 계산 결과를 보여줍니다. 요즘에는 높은 메모리가 더 이상 중요하지 않기 때문에(대부분 대용량 RAM이 있는 컴퓨터는 64비트 CPU를 사용하므로 결과를 표시하기 위해 그래프를 제한했습니다. 일반 구역의 경우. lowmem_reserve 계산은 setup_per_zone_lowmem_reserve 에서 수행됩니다 . 커널은 모든 것을 반복합니다.시스템의 노드를 총계로 나누어 노드의 각 구역에 대한 최소 보유량을 계산합니다. sysctl_lowmem_reserve_ratio[zone] 으로 영역의 페이지 프레임 수 . 기본 설정은제수는 낮은 메모리의 경우 256이고 높은 메모리의 경우 32입니다.
Hot-N-Cold Pages¶
구조체 영역 의 페이지 세트 요소는 핫 앤 콜드 할당자를 구현하는 데 사용됩니다. 커널은 다음을 가리킨다. CPU 캐시에 있는 경우 메모리의 페이지가 핫 하므로 해당 페이지의 데이터에 더 빠르게 액세스할 수 있습니다. RAM에 있었어요. 반대로 콜드 페이지는 캐시에 보관되지 않습니다. 각 CPU에는 다중 프로세서 시스템에 하나 이상의 캐시가 있으므로 각 CPU에 대해 관리가 별도로 이루어져야 합니다.
영역이 특정 NUMA 노드에 속하고 따라서 특정 CPU와 연결되어 있더라도 다른 CPU의 캐시에는 이 영역의 페이지가 포함될 수 있습니다. 궁극적으로 각 프로세서는 속도는 다르지만 시스템의 모든 페이지에 액세스할 수 있습니다. 따라서 영역별 데이터 구조는 해당 영역의 NUMA 노드와 연결된 CPU뿐만 아니라 해당 영역의 다른 모든 CPU에도 적합해야 합니다.
페이지 세트 는 시스템이 수용할 수 있는 최대 CPU 수만큼 많은 항목을 보유하는 배열입니다. <mmzone.h> struct zone { … struct per_cpu_pageset pageset[NR_CPUS]; … };
NR_CPUS 는 컴파일 타임에 정의되는 구성 가능한 전처리기 상수입니다. 이 값은 단일 프로세서 시스템에서는 항상 1이지만 SMP 시스템용으로 컴파일된 커널에서는 2에서 32 사이(또는 64비트 시스템에서는 64)일 수 있습니다.
이 값은 시스템에 실제로 존재하는 CPU 수가 아니라 커널이 지원하는 최대 CPU 수를 반영합니다.
배열 요소는 다음과 같이 정의된 per_cpu_pageset 유형입니다.
<mmzone.h> struct per_cpu_pageset { struct per_cpu_pages pcp[2]; /* 0: hot. 1: cold */ } ____cacheline_aligned_in_smp;
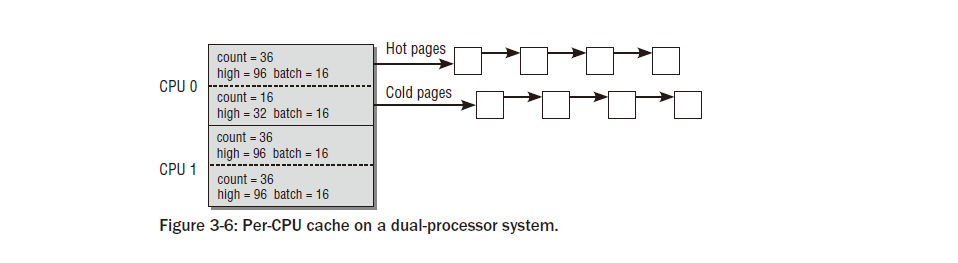
구조는 두 개의 항목이 있는 배열로 구성됩니다. 첫 번째는 핫 페이지를 관리하고 두 번째는 콜드 페이지를 관리합니다. 유용한 데이터는 per_cpu_pages에 보관됩니다
<mmzone.h> struct per_cpu_pages { int count; /* number of pages in the list / int high; / high watermark, emptying needed / int batch; / chunk size for buddy add/remove / struct list_head list; / the list of pages */ };
count는 요소와 관련된 페이지 수를 기록하는 반면 high 는 워터마크입니다. count 값이 high를 초과 하면 목록에 페이지가 너무 많다는 의미입니다. 낮은 채우기 상태에는 명시적인 워터마크가 사용되지 않습니다. 요소가 남아 있지 않으면 목록이 다시 채워집니다. list는 CPU당 페이지를 보유하고 커널의 표준 방법을 사용하여 처리되는 이중 연결 목록입니다. 가능하다면 CPU당 캐시는 개별 페이지로 채워지지 않고 여러 페이지 청크로 채워집니다. 배치는 단일 패스에 추가할 페이지 수에 대한 지침입니다. 그림 3-6은 듀얼 프로세서 시스템에서 CPU당 캐시의 데이터 구조가 어떻게 채워지는지 그래픽으로 보여줍니다.
워터마크 계산 방법과 캐시 데이터 구조 초기화 방법은 섹션 3.4.2에서 자세히 설명합니다.
Page Frames¶
페이지 프레임은 시스템 메모리의 가장 작은 단위를 나타내며 RAM의 각 페이지에 대해 구조체 페이지 의 인스턴스가 생성됩니다. 커널 프로그래머는 적당한 RAM 구성을 사용하더라도 시스템의 메모리가 매우 많은 수의 페이지 로 나누어지기 때문에 이 구조를 가능한 한 작게 유지하도록 주의를 기울입니다 . 예를 들어, 표준 페이지 크기 4KiB로 작동하는 IA-32 시스템은 주 메모리 크기가 384MiB인 경우 약 100,000페이지를 갖습니다. 이 메모리 크기는 확실히 오늘날의 표준에 비해 지나치게 크지는 않지만 페이지 수는 이미 상당합니다. 이것이 바로 커널이 구조체 페이지를 가능한 한 작게 유지하기 위해 많은 노력을 기울이는 이유입니다. 일반적인 시스템의 엄청난 페이지 수로 인해 구조가 조금만 변경되어도 모든 페이지 인스턴스 를 유지하는 데 필요한 물리적 메모리 양이 크게 증가합니다 . 구조를 작게 유지하는 것은 페이지의 편재성으로 인해 정확하게 단순화되지는 않습니다. 페이지는 메모리 관리의 많은 부분과 다양한 애플리케이션에 사용됩니다. 커널의 한 부분은 구조체 페이지 에서 사용할 수 있는 특정 정보에 절대적으로 의존하지만 , 이는 다른 부분에는 쓸모가 없을 수 있습니다. 이 부분 자체는 다른 정보에 의존하고, 다른 부분에는 완전히 쓸모가 없을 수 있습니다. 에 … . AC Union은 처음에 구조체 페이지 의 명확성이 향상되지 않더라도 자연스럽게 이 문제에 대한 해결책으로 활용됩니다 . 예를 들어 보겠습니다. 물리적 페이지는 여러 위치의 페이지 테이블을 통해 가상 주소 공간에 매핑될 수 있으며 커널은 페이지를 매핑하는 장소 수를 추적하려고 합니다. 이를 위해 구조체 페이지 의 카운터는 매핑 수를 계산합니다. 페이지가 슬러브에 의해 사용되는 경우 할당자(전체 페이지를 더 작은 부분으로 나누는 수단, 섹션 3.6.1 참조)는 커널에서만 사용되며 다른 곳에서는 사용되지 않도록 보장되므로 맵 개수 정보가 불필요합니다. 대신, 커널은 페이지를 세분화하여 사용 중인 작은 메모리 개체 수를 나타내기 위해 필드를 재해석할 수 있습니다. 이중 해석은 데이터 구조 정의에서 다음과 같습니다. <mm_types.h> struct page { … union { atomic_t _mapcount; /* Count of ptes mapped in mms, * to show when page is mapped * & limit reverse map searches. / unsigned int inuse; / SLUB: Nr of objects */ }; … }
atom_t 와 unsigned int 는 두 가지 다른 데이터 유형입니다. 첫 번째는 값을 원자적으로 변경할 수 있습니다. 즉, 동시 액세스에 대해 안전하고 두 번째는 고전적인 정수입니다 . omic_t는 32비트를 제공하며6 정수는 Linux가 지원하는 각 아키텍처에서 이만큼의 비트를 제공합니다. 이제 다음과 같이 정의를 ‘간단화’하고 싶은 유혹이 생길 수 있습니다.
struct page { … atomic_t counter; … } 그러나 이는 나쁜 스타일이며 커널 개발자가 완전히 받아들일 수 없는 것입니다. 슬러브 코드는 객체 카운터에 접근하기 위해 원자성이 필요하지 않으며 이는 데이터 유형에도 반영되어야 합니다. 그리고 가장 중요한 것은 코드의 가독성이 두 하위 시스템 모두에서 저하된다는 것입니다. _mapcount 및 inuse는 요소의 내용에 대한 명확하고 간결한 설명을 제공하지만 counter 는 거의 모든 것을 의미할 수 있습니다.
Definition of page¶
구조는 다음과 같이 정의됩니다. <mm.h> struct page {
unsigned long flags; /* Atomic flags, some possibly * updated asynchronously / atomic_t _count; / Usage count, see below. / union { atomic_t _mapcount; / Count of ptes mapped in mms, * to show when page is mapped * & limit reverse map searches. */
unsigned int inuse; /* SLUB: Nr of objects */}; union { struct { unsigned long private; /* Mapping-private opaque data: * usually used for buffer_heads * if PagePrivate set; used for * swp_entry_t if PageSwapCache; * indicates order in the buddy * system if PG_buddy is set. / struct address_space *mapping; / If low bit clear, points to * inode address_space, or NULL. * If page mapped as anonymous * memory, low bit is set, and * it points to anon_vma object: * see PAGE_MAPPING_ANON below. / }; … struct kmem_cache *slab; / SLUB: Pointer to slab / struct page *first_page; / Compound tail pages / }; union { pgoff_t index; / Our offset within mapping. / void *freelist; / SLUB: freelist req. slab lock / }; struct list_head lru; / Pageout list, eg. active_list * protected by zone->lru_lock ! / #if defined(WANT_PAGE_VIRTUAL) void *virtual; / Kernel virtual address (NULL if not kmapped, ie. highmem) / #endif / WANT_PAGE_VIRTUAL */
};
slab, freelist 및 inuse 요소는 slub 할당자에서 사용됩니다. 우리는 이러한 특별한 배열에 관심을 가질 필요가 없으며 슬러브 할당자에 대한 지원이 커널에 컴파일되지 않으면 사용되지 않으므로 문제를 단순화하기 위해 다음 논의에서는 생략합니다. 각 페이지 프레임은 사용된 CPU 유형에 의존하지 않는 아키텍처 독립적 형식으로 이 구조로 설명됩니다. 슬러브 요소 외에도 페이지 구조에는 다른 곳에서 논의된 커널 하위 시스템의 맥락에서만 정확하게 설명될 수 있는 여러 다른 요소가 포함되어 있습니다. 그럼에도 불구하고 나는 구조의 내용에 대한 개요를 제공할 것입니다. 이는 이후 장을 참조하는 것을 의미합니다.
플래그는 페이지 속성을 설명하기 위해 아키텍처 독립적인 플래그를 저장합니다. 아래에서는 다양한 플래그 옵션에 대해 설명합니다. count 는 커널에서 해당 페이지를 참조한 횟수를 나타내는 사용 횟수입니다.
해당 값이 0에 도달하면 커널은 페이지인스턴스가 현재 사용 중이 아니므로 제거할 수 있음을 알게 됩니다. 해당 값이 0보다 크면 인스턴스가 메모리에서 제거되어서는 안 됩니다. 참조 카운터에 익숙하지 않은 경우 자세한 내용은 부록 C를 참조하세요. -mapcount는 해당 페이지를 가리키는 페이지 테이블의 항목 수를 나타냅니다. lru는 페이지를 그룹화할 수 있는 다양한 목록에 페이지를 유지하는 데 사용되는 목록 헤드입니다. 다양한 카테고리, 가장 중요한 것은 활성 페이지와 비활성 페이지입니다. 특히 18장의 논의는 이 목록으로 다시 돌아올 것입니다. 커널에서는 인접한 여러 페이지를 더 큰 복합 페이지로 결합할 수 있습니다. 첫번째 클러스터의 페이지를 헤드 페이지 라고 하고 다른 모든 페이지를 테일 페이지라고 합니다. 모든 테일 페이지에는 first_page가 헤드 페이지를 가리키도록 설정되어 있습니다. 매핑은 페이지 프레임이 위치하는 주소 공간을 지정합니다. index 는 매핑 내의 오프셋입니다. 주소 공간은 예를 들어 파일 을 메모리로 읽을 때 사용되는 매우 일반적인 개념입니다. 주소 공간은 파일 내용(데이터)을 내용이 읽혀지는 메모리 영역과 연결하는 데 사용됩니다. 작은 트릭을 사용하여7 매핑은 포인터뿐 아니라 페이지가 주소 공간과 연결되지 않은 익명 메모리 영역에 속하는지 여부에 대한 정보도 저장할 수 있습니다. 숫자 값 1의 비트가 매핑 에 설정된 경우 포인터는 address_space 의 인스턴스를 가리키는 것이 아니라 익명 페이지에 대한 역 매핑 구현에 중요한 다른 데이터 구조 (anon_vma) 를 가리킵니다. 이 구조는 섹션 4.11.2에서 논의됩니다. address_space 인스턴스는 항상 sizeof(long) 에 맞춰 정렬되므로 포인터를 두 번 사용할 수 있습니다 . 따라서 이 인스턴스에 대한 포인터의 최하위 비트는 Linux가 지원하는 모든 시스템에서 0입니다. 포인터가 일반적으로 address_space의 인스턴스를 가리키는 경우 포인터를 직접 사용할 수 있습니다 . 최하위 비트를 1로 설정하는 트릭을 사용하면 커널은 다음 작업을 통해 포인터를 복원할 수 있습니다. anon_vma = (struct anon_vma *) (매핑 - PAGE_MAPPING_ANON) 개인은 가상 메모리 관리에서 무시되는 ‘개인’ 데이터에 대한 포인터입니다. 포인터는 페이지 사용량에 따라 다양한 방식으로 사용될 수 있습니다. 이는 다음 장에서 설명하는 것처럼 페이지를 데이터 버퍼와 연결하는 데 주로 사용됩니다.
virtual은 highmem 영역의 페이지, 즉 커널 메모리에 직접 매핑될 수 없는 페이지에 사용됩니다. virtual은 페이지의 가상주소를 승인합니다 . 전처리기 문 #ifdef{WANT_PAGE_VIRTUAL} 에서 볼 수 있듯이 가상 요소는 해당 전처리기 상수가 정의된 경우 구조체 페이지 의 일부일 뿐입니다 . 현재 이는 Motorola m68k, FRV 및 Extensa와 같은 일부 아키텍처에만 해당됩니다.
다른 모든 아키텍처는 가상 페이지 주소를 지정하는 다른 방식을 채택합니다. 이것의 핵심은 모든 highmem 페이지의 주소를 찾는 데 사용되는 해시 테이블입니다. 섹션 3.5.8에서는 적절한 기술을 더 자세히 다루고 있습니다. 해시 테이블을 처리하려면 앞서 언급한 시스템에서는 느린 몇 가지 수학적 연산이 필요하므로 직접 접근 방식을 선택했습니다.
Architecture-Independent Page Flags¶
페이지의 다양한 속성은 구조체 페이지 의 플래그 요소 에 비트로 저장된 일련의 페이지 플래그로 설명됩니다 . 플래그는 사용된 아키텍처와 독립적이므로 CPU 또는 시스템 관련 정보를 제공할 수 없습니다 (이 정보는 아래 표시된 것처럼 페이지 테이블 자체에 보관됩니다). page-flags.h 의 전처리기의 도움으로 개별 플래그가 정의될 뿐만 아니라 플래그를 설정, 삭제 및 쿼리하기 위한 매크로도 생성됩니다. 그렇게 함으로써 커널은 보편적인 규칙을 따릅니다. 명명 체계; 예를 들어, PG_locked 상수는 페이지가 잠겨 있는지 여부를 지정하기 위해 플래그 의 비트 위치를 정의합니다 . 비트를 조작하는 데 다음 매크로를 사용할 수 있습니다. pageLocked는 비트가 설정되어 있는지 쿼리합니다. SetPageLocked는 이전 상태에 관계없이 PG_locked 비트를 설정합니다 . TestSetPageLocked는 비트를 설정하지만 이전 값도 반환합니다. ClearPageLocked는 이전 상태에 관계없이 비트를 삭제합니다. TestClearPageLocked는 비트를 삭제하고 이전 값을 반환합니다. 다른 페이지 플래그에 대한 적절한 비트에 표시된 작업을 수행하는 동일한 매크로 세트가 있습니다. 매크로는 원자적으로 구현됩니다. 그 중 일부는 여러 명령문으로 구성되어 있지만 마치 단일 명령문인 것처럼 작동하도록 특수 프로세서 명령이 사용됩니다.
즉, 경쟁 조건이 발생할 수 있으므로 중단할 수 없습니다. (14장에서는 경쟁 조건이 어떻게 발생하고 이를 방지할 수 있는지 설명합니다.)
어떤 페이지 플래그를 사용할 수 있나요? 다음 목록에는 가장 중요한 플래그가 포함되어 있습니다 (다시 말하지만 해당 의미는 이후 장에서 명확해집니다).
PG_locked는 페이지가 잠겨 있는지 여부를 지정합니다. 비트가 설정되면 커널의 다른 부분은 활성화되지 않습니다. 페이지에 접근이 허용되었습니다. 이는 예를 들어 하드 디스크에서 페이지 프레임으로 데이터를 읽을 때 메모리 관리의 경쟁 조건을 방지합니다.
이지와 관련된 I/O 작업 중에 오류가 발생하면 PG_error 가 설정됩니다. PG_referenced 및 PG_active는 시스템에서 페이지를 얼마나 적극적으로 사용하는지 제어합니다. 이 정보는 교체 하위 시스템이 교체할 페이지를 선택해야 할 때 중요합니다. 두 플래그의 상호 작용은 18장에서 설명됩니다.
PG_uptodate는 블록 장치에서 페이지의 데이터를 오류 없이 읽었음을 나타냅니다. PG_dirty 는 하드의 데이터와 비교하여 페이지의 내용이 변경된 경우 설정됩니다. 디스크. 성능상의 이유로 각 변경 후 페이지가 즉시 다시 기록되지 않습니다. 따라서 커널은 이 플래그를 사용하여 나중에 플러시할 수 있도록 변경된 페이지를 기록합니다. 이 플래그가 설정된 페이지를 더티(dirty )라고 합니다 (일반적으로 이는 RAM의 데이터와 하드 디스크와 같은 보조 저장 매체의 데이터가 동기화되지 않았음을 의미합니다).
PG_lru는 페이지 회수 및 교환을 구현하는 데 도움이 됩니다. 커널은 활성 페이지와 비활성 페이지를 구별하기 위해 가장 최근에 사용된 두 개 의 목록8을 사용합니다.
페이지가 이러한 목록 중 하나에 있으면 비트가 설정됩니다. 페이지가 활성 페이지 목록에 있는 경우 설정되는 PG_active 플래그 도 있습니다 .
18장에서는 이 중요한 메커니즘에 대해 자세히 설명합니다.
PG_highmem은 페이지가 커널 메모리에 영구적으로 매핑될 수 없기 때문에 페이지가 높은 메모리에 있음을 나타냅니다.
페이지 구조 의 private 요소 값이 NULL이 아닌 경우 PG_private을 설정해야 합니다. I/O에 사용되는 페이지는 이 필드를 사용하여 페이지를 버퍼 로 세분화 하지만(자세한 내용은 16장 참조), 커널의 다른 부분에서는 개인 데이터를 페이지에 연결하는 데 다른 용도를 찾습니다.
PG_writeback은 내용이 블록에 다시 기록되는 중인 페이지에 대해 설정됩니다.
PG_slab은 섹션 3.6에서 설명한 슬랩 할당자의 일부인 페이지에 대해 설정됩니다. 페이지가 스왑 캐시에 있으면 PG_swapcache가 설정됩니다. 이 경우 private 에는 다음 항목이 포함됩니다. swap_entry_t를 입력하십시오 (자세한 내용은 18장에서 제공됩니다). 사용 가능한 메모리 양이 작아지면 커널은 주기적으로 페이지 회수 , 즉 비활성 상태의 사용되지 않는 페이지를 제거하려고 시도합니다. 자세한 내용은 18장에서 설명합니다. 커널이 특정 페이지를 회수하기로 결정하면 PG_reclaim 플래그를 설정하여 이를 알립니다.
PG_buddy 페이지가 free이고 버디 시스템의 목록, 즉 코어에 포함되어 있으면 설정됩니다. 페이지 할당 메커니즘. PG_compound는 페이지가 여러 페이지로 구성된 더 큰 복합 페이지의 일부임을 나타냅니다. 인접한 일반 페이지.
페이지에 특정 비트가 설정되어 있는지 확인하거나 비트를 조작하기 위해 여러 표준 매크로가 정의되어 있습니다. 이름은 특정 패턴을 따릅니다.
PageXXX(페이지)는 페이지에 PG_XXX 비트가 설정되어 있는지 확인합니다. 예를 들어 PageDirty는 다음을 확인합니다. PG_dirty 비트, PageActive는 PG_active 등을 확인합니다 . 비트가 설정되지 않은 경우 설정하고 이전 값을 반환하기 위해 SetPageXXX가 제공됩니다. ClearPageXXX는 특정 비트를 무조건 삭제합니다. TestClearPageXXX는 비트가 설정된 경우 비트 를 지우지만 이전 활성 값도 반환합니다.
이러한 작업은 원자적으로 구현됩니다. 5장에서는 이것이 무엇을 의미하는지 더 자세히 설명합니다.
페이지 상태가 변경될 때까지 기다렸다가 작업을 재개해야 하는 경우가 많습니다. 커널이 제공하는 두 가지 보조 기능이 특히 중요합니다. <pagemap.h> void wait_on_page_locked(struct page *page); void wait_on_page_writeback(struct page *page)
커널의 한 부분이 잠긴 페이지가 잠금 해제될 때까지 기다리기를 원한다고 가정합니다. wait_on_page_locked를 사용 하면 이 작업을 수행할 수 있습니다. 이것이 기술적으로 수행되는 방법은 14장에서 논의되지만, 여기서는 함수를 호출한 후 페이지가 잠기면 커널이 절전 모드로 전환된다는 점만 알아두면 충분합니다. 페이지의 잠금이 해제되면 슬리퍼는 자동으로 깨어나 작업을 계속할 수 있습니다. wait_on_page_writeback은 비슷하게 작동하지만 페이지에 포함된 데이터가 블록 장치(예: 하드 디스크)와 동기화되는 보류 중인 쓰기 저장 작업이 완료될 때까지 기다립니다.
3.3 Page Tables¶
계층적으로 연결된 페이지 테이블은 대규모 주소 공간의 빠르고 효율적인 관리를 지원하는 데 사용됩니다. 이 접근 방식의 기본 원리와 선형 주소 지정과 비교하여 제공되는 이점은 1장에서 설명합니다. 여기서는 구현의 기술적 측면을 자세히 살펴보겠습니다. 페이지 테이블은 사용자 프로세스의 가상 주소 공간과 시스템의 물리적 메모리(RAM, 페이지 프레임) 간의 연관을 설정하는 데 사용됩니다. 지금까지 논의된 구조는 RAM 메모리의 구조(노드와 영역으로 분할)를 설명하고 포함된 페이지 프레임의 수와 상태(사용되거나 사용되지 않음)를 지정하는 데 사용됩니다. 페이지 테이블은 각 프로세스에서 사용할 수 있는 균일한 가상 주소 공간을 만드는 데 사용됩니다. 응용 프로그램에서는 이 공간을 연속적인 메모리 영역으로 간주합니다. 또한 테이블은 사용되는 가상 페이지를 RAM에 매핑하므로 공유 메모리(동시에 여러 프로세스에서 공유하는 메모리) 구현과 페이지를 블록 장치로 스왑 아웃하여 사용 가능한 메모리의 유효 크기를 늘릴 수 있습니다. 추가 물리적 RAM이 필요합니다.
커널 메모리 관리에서는 기본 프로세서에 해당하는지 여부에 관계없이 4단계 페이지 테이블을 가정합니다. 이 가정이 사실 이 아닌 가장 좋은 예는 IA-32 시스템입니다. 기본적으로 이 아키텍처는 PAE 확장이 사용되지 않는다고 가정하여 2단계 페이징 시스템만 사용합니다. 결과적으로 세 번째 및 네 번째 수준은 아키텍처별 코드로 에뮬레이트되어야 합니다. 페이지 테이블 관리는 두 부분, 즉 첫 번째 아키텍처 종속 부분과 두 번째 아키텍처 독립적 부분으로 나뉩니다. 흥미롭게도 모든 데이터 구조와 이를 조작하는 거의 모든 기능은 아키텍처별 파일에 정의되어 있습니다. CPU별 구현 간에는(사용된 다양한 CPU 개념으로 인해) 큰 차이가 있기 때문에 간결성을 위해 낮은 수준의 세부 사항은 다루지 않겠습니다. 개별 프로세서에 대한 광범위한 지식도 필요하며, 각 프로세서 제품군에 대한 하드웨어 설명서는 일반적으로 여러 권의 책에 분산되어 있습니다. 부록 A에서는 IA-32 아키텍처를 더 자세히 설명합니다. 또한 최소한 요약 형식으로 Linux에서 지원하는 다른 중요한 프로세서의 아키텍처에 대해서도 설명합니다. 다음 섹션의 데이터 구조 및 기능에 대한 설명은 일반적으로 아키텍처 종속 파일에서 제공되는 인터페이스를 기반으로 합니다. 정의는 헤더 파일 include/asm-arch/page.h 및 include/asm-arch/pgtable.h 에서 찾을 수 있으며 아래에서는 축약된 형태로 page.h 및 pgtable.h 로 참조됩니다 . AMD64와 IA-32는 하나의 아키텍처로 통합되었지만 페이지 테이블 처리와 관련하여 많 은 차이점을 나타내기 때문에 해당 정의는 두 개의 다른 파일(include/asm-x86/page_32.h 및 include /asm-x86) 에서 찾을 수 있습니다. /page_64.h, pgtable_XX.h 와 유사합니다 . 특정 아키텍처와 관련된 측면을 논의할 때 해당 아키텍처를 명시적으로 언급합니다. 다른 모든 정보는 연관된 구조의 정의가 아키텍처별로 다르더라도 모든 아키텍처에 동일하게 유효합니다.
3.3.1 Data Structures¶
C에서 void* 데이터 유형은 메모리의 모든 바이트 위치에 대한 포인터를 지정하는 데 사용됩니다. 필요한 비트 수는 아키텍처에 따라 다릅니다. 모든 일반 프로세서(Linux가 실행되는 모든 프로세서 포함)는 32비트 또는 64비트를 사용합니다. 커널 소스에서는 void* 와 unsigned long이 동일한 비트 수를 갖고 있어 정보 손실 없이 타입 변환을 통해 상호 변환될 수 있다고 가정합니다. 공식적으로 sizeof(void*) == sizeof(unsigned long) 으로 표현되는 이 가정은 물론 Linux가 지원하는 모든 아키텍처에서 적용됩니다. 메모리 관리에서는 처리 및 조작이 더 쉽기 때문에 void 포인터 대신 unsigned long 유형의 변수를 사용하는 것을 선호합니다 . 기술적으로 둘 다 동일하게 유효합니다.
Breakdown of Addresses inMemory¶
가상 메모리의 주소는 4단계 페이지 테이블 구조에 따라 5개 부분으로 분할됩니다 (페이지를 선택하는 4개의 테이블 항목과 페이지 내 위치를 나타내는 인덱스). 길이뿐만 아니라 주소가 분할되는 방식도 개별 아키텍처에 따라 다릅니다. 따라서 커널은 주소를 개별 구성 요소로 분해하는 매크로를 정의합니다.

그림 3-7은 비트 이동에 의해 주소 요소의 위치가 어떻게 정의되는지 보여줍니다. BITS_PER_LONG은 부호 없는 긴 변수 에 사용되는 비트 수를 지정하므로 가상 주소 공간에 대한 일반 포인터에도 사용됩니다. 각 포인터의 끝에는 선택한 프레임 페이지 내의 위치를 지정하는 여러 비트가 있습니다. 필요한 비트 수는 PAGE_SHIFT에 보관됩니다. PMD_SHIFT는 페이지 와 페이지 테이블의 마지막 레벨에 있는 항목이 사용하는 총 비트 수를 지정합니다 . 이 숫자를 PAGE_SHIFT 에서 빼면 페이지 테이블의 마지막 계층 구조 수준에 있는 항목에 필요한 비트 수를 결정할 수 있습니다. 더 중요한 것은 이 값이 중간 페이지 테이블의 항목이 관리하는 부분 주소 공간의 크기, 즉 2PMD_SHIFT 바이트를 나타낸다는 사실입니다. PUD_SHIFT는 PAGE_OFFSET 과 PMD_SHIFT 의 비트 길이를 더하는 반면 , PGDIR_SHIFT는 PAGE_OFFSET, PUD_SHIFT 및 PMD_SHIFT 의 비트 길이를 페이지 중간 디렉터리 항목의 비트 번호와 결합합니다. 값은 페이지 전역 디렉터리의 항목을 통해 주소를 지정할 수 있는 부분 주소 공간 크기의 이진 로그입니다. 페이지 테이블의 다양한 디렉토리에 저장될 수 있는 포인터의 수도 매크로 정의에 의해 결정됩니다. PTRS_PER_PGD는 페이지 전역 디렉터리의 항목 수를 지정하고, PTRS_PER_PMD는 페이지 중간 디렉터리의 수, PTRS_PER_PUD는 페이지 상위 디렉터리의 수, PTRS_PER_PTE는 페이지 테이블 항목의 수를 지정합니다.
2레벨 페이지 테이블이 있는 아키텍처는 PTRS_PER_PMD 및 PTRS_PER_PUD를 1로 정의합니다. 이는 두 페이지만 사용되지만 커널의 나머지 부분이 4레벨 페이지 변환으로 작업하고 있음을 설득합니다. 페이지 중간 및 페이지 상위 디렉토리는 효과적으로 제거됩니다. 항목이 하나만 있습니다. 4단계 페이지 테이블을 사용하는 시스템은 거의 없기 때문에 커널은 헤더 파일 include/asm-generic/pgtable-nopud.h를 사용하여 네 번째 페이지 테이블의 존재를 시뮬레이션하는 데 필요한 모든 선언을 보유합니다. 헤더 파일 include/asm-generic/pgtable-nopmd.h는 2레벨 주소 변환을 사용하는 시스템에서 세 번째 페이지 테 이블 레벨의 존재를 시뮬레이션하는 데에도 사용할 수 있습니다.
n비트 길이 의 포인터로 주소를 지정할 수 있는 주소 영역의 크기는 2n 바이트입니다. 커널반복할 필요가 없도록 계산된 값을 보유할 추가 매크로 변수를 정의합니다. 몇 번이고 계산을 반복합니다. 변수는 다음과 같이 정의됩니다. #define PAGE_SIZE (1UL << PAGE_SHIFT) #define PUD_SIZE (1UL << PUD_SHIFT) #define PMD_SIZE (1UL << PMD_SHIFT) #define PGDIR_SIZE (1UL << PGDIR_SHIFT)
값 2n은 이진 시스템에서 비트 n 위치를 왼쪽으로 이동하여 쉽게 계산됩니다.위치 0. 커널은 이 ‘트릭’을 여러 곳에서 사용합니다. 비트 연산에 익숙하지 않은 분들은부록 C에서 관련 설명을 찾아보세요.
include/asm-x86/pgtable_64.h #define PGDIR_SHIFT 39 #define PTRS_PER_PGD 512 #define PUD_SHIFT 30 #define PTRS_PER_PUD 512 #define PMD_SHIFT 21 #define PTRS_PER_PMD 512
매크로 PTRS_PER_XXX는 주어진 디렉토리 항목이 얼마나 많은 포인터(즉, 다른 값)를 지정할 수 있는지 지정합니다. 대표하다. AMD64는 각 디렉토리에 9비트를 사용하므로 각각에 29 = 512개의 포인터가 맞습니다. 커널은 또한 주어진 주소에서 개별 구성 요소를 추출하는 수단이 필요합니다. 커널이를 위해 아래에 정의된 비트마스크를 사용합니다.
#define PAGE_MASK (~(PAGE_SIZE-1)) #define PUD_MASK (~(PUD_SIZE-1)) #define PMD_MASK (~(PMD_SIZE-1)) #define PGDIR_MASK (~(PGDIR_SIZE-1))
Format of Page Tables¶
페이지 테이블의 항목 크기는 위 정의에 의해 설정되었지만 그렇지 않습니다. 그들의 구조. 커널은 항목을 나타내기 위해 4개의 데이터 구조( page.h에 정의됨) 를 제공합니다. 구조. 역 디렉터리 항목의 경우 pgd_t입니다 . pud_t는 페이지 상위 디렉토리의 항목입니다. 페이지 중간 디렉터리의 항목에 대한 pmd_t입니다 . 직접 페이지 테이블 항목의 경우 pte_t입니다 페이지 테이블 항목을 분석하는 표준 함수는 표 3-2에 나열되어 있습니다. (아키텍처에 따라일부 함수는 매크로로 구현되고 다른 함수는 인라인 함수로 구현됩니다. 나는 둘 사이에 구별을 두지 않는다.아래 두 개.)

오프셋 기능은 어떻게 작동하나요? pmd_offset을 예로 들어보겠습니다 . 페이지 전역 디렉터리 (src_pgd) 의 항목 과 메모리 주소가 매개변수로 필요합니다. 페이지 중간 디렉터리 중 하나에서 요소를 반환합니다.
src_pmd = pmd_offset(src_pgd, address);
PAGE_ALIGN은 각 아키텍처(일반적으로 page.h) 에서 정의해야 하는 또 다른 표준 매크로입니다 . 주소를 매개변수로 예상하고 주소가 정확히 다음 페이지의 시작 부분에 있도록 ‘반올림’합니다. 페이지 크기가 4,096인 경우 매크로는 항상 이 크기의 정수 배수를 반환합니다. PAGE_ALIGN(6000) = 8192 = 2× 4,096, PAGE_ALIGN(0x84590860) = 0x84591000 = 542,097 × 4,096. 프로세서의 캐시 리소스를 최대한 활용하려면 페이지 경계에 대한 주소 정렬이 중요합니다. C 구조는 페이지 테이블의 항목을 나타내는 데 사용되지만 대부분은 AMD64 아키텍처의 예에서 볼 수 있듯이 단일 요소(일반적으로 unsigned long )로 구성됩니다.
include/asm-x86_64/page.h typedef struct { unsigned long pte; } pte_t; typedef struct { unsigned long pmd; } pmd_t; typedef struct { unsigned long pud; } pud_t; typedef struct { unsigned long pgd; } pgd_t
페이지 테이블 요소의 내용이 관련 도우미 함수에 의해서만 처리되고 직접적으로 처리되지 않도록 보장하기 위해 기본 유형 대신 구조체가 사용됩니다. 항목은 여러 기본 변수로 구성될 수도 있습니다. 이 경우 커널은 구조체를 사용해야 합니다 .
가상 주소는 익숙한 구성표에 따라 페이지 테이블의 인덱스로 사용되는 여러 부분으로 분할됩니다. 따라서 개별 부분의 길이는 사용된 아키텍처의 단어 길이에 따라 32비트 또는 64비트 미만입니다. 커널 소스에서 발췌한 내용에서 알 수 있듯이 커널(및 프로세서)은 32비트 또는 64비트 유형을 사용하여 (테이블 수준에 관계없이) 페이지 테이블의 항목을 나타냅니다. 이는 유용한 데이터, 즉 다음 테이블의 기본 주소를 저장하는 데 테이블 항목의 모든 비트가 필요한 것은 아니라는 것을 의미합니다. 불필요한 비트는 추가 정보를 저장하는 데 사용됩니다. 부록 A에서는 다양한 아키텍처의 페이지 테이블 구조를 자세히 설명합니다.
PTE-Specific Entries¶
페이지 테이블의 각 최종 항목은 페이지의 메모리 위치에 대한 포인터를 생성할 뿐만 아니라 위에서 언급한 불필요한 비트의 페이지에 대한 추가 정보도 보유합니다. 이러한 데이터는 CPU별로 다르지만 일반적으로 페이지 액세스 제어에 대한 최소한의 정보를 제공합니다. Linux 커널이 지원하는 대부분의 CPU에는 다음 요소가 있습니다.
PAGE_PRESENT는 가상 페이지가 RAM 메모리에 존재하는지 여부를 지정합니다. 그럴 필요는 없다. 1장에서 간략하게 설명한 것처럼 페이지가 스왑 영역으로 스왑 아웃될 수 있기 때문에 반드시 그런 경우가 있습니다. 페이지 테이블 항목의 구조는 일반적으로 페이지가 메모리에 없으면 메모리에서 페이지의 위치를 설명할 필요가 없기 때문에 다릅니다. 대신, 교체된 페이지를 식별하고 찾기 위한 정보가 필요합니다.
AGE_ACCESSED 는 페이지에 액세스할 때마다 CPU에 의해 자동으로 설정됩니다. 커널은 페이지가 얼마나 적극적으로 사용되는지 확인하기 위해 정기적으로 필드를 확인합니다(자주 사용되지 않는 페이지는 좋은 교환 후보입니다). 비트는 읽기 또는 쓰기 액세스 후에 설정됩니다.
AGE_DIRTY는 페이지가 ‘더티’인지, 즉 페이지 내용이 손상되었는지 여부를 나타냅니다.
AGE_FILE은 _PAGE_DIRTY 와 동일한 숫자값을 가지지 만, 메모리에 페이지가 존재 하지 않는 경우와는 다른 맥락 에서 사용됩니다 . 분명히 존재하지 않는 페이지는 더티일 수 없으므로 비트가 재해석될 수 있습니다. 설정되지 않은 경우 항목은 교체된 페이지의 위치를 가리킵니다(18장 참조). 섹션 4.7.3에서 논의되는 비선형 파일 매핑에 속하는 항목에는 _PAGE_FILE 세트가 필요합니다.
AGE_USER를 설정하면 사용자 공간 코드로 해당 페이지에 접근할 수 있습니다. 그렇지 않으면 커널만 이를 수행할 수 있습니다(또는 CPU가 시스템 모드에 있을 때).
AGE_READ, _PAGE_WRITE 및 _PAGE_EXECUTE는 일반 사용자 프로세스가 페이지를 읽거나, 페이지에 쓰거 나, 페이지의 기계어 코드를 실행할 수 있는지 여부를 지정합니다. 커널 메모리의 페이지는 사용자 프로세스에 의한 쓰기로부터 보호되어야 합니다. 그러나 예를 들어 페이지에 의도적으로 또는 의도하지 않게 수정될 수 없는 실행 코드가 포함되어 있는 경우 사용자 프로세스에 속한 페이지라도 기록될 수 있다는 보장은 없습니다. 덜 세분화된 액세스 권한을 갖춘 아키텍처는 두 가지를 구별할 수 있는 추가 기준이 없는 경우 읽기 및 쓰기 액세스를 결합하여 허용하거나 허용하지 않도록 _PAGE_RW 상수를 정의합니다.
IA-32 및 AMD64는 페이지 내용에 실행 불가능으로 레이블을 지정하는 _PAGE_BIT_NX를 제공합니다 (이 보호 비트는 64GiB 메모리 주소 지정을 위한 페이지 주소 확장이 활성화된 경우 IA-32 시스템에서만 사용할 수 있습니다). 예를 들어, 악성 코드가 도입된 경우 의도적으로 유발된 버퍼 오버플로로 인해 프로그램의 보안 공백이 발생할 수 있는 스택 페이지의 코드 실행을 방지할 수 있습니다. NX 비트는 버퍼 오버플로를 방지할 수는 없지만 프로세스가 악성 코드 실행을 거부하므로 그 영향을 억제할 수 있습니다. 물론 일부(불행히도 흔하지는 않은) 프로세서의 경우와 같이 아키텍처 자체가 메모리 페이지에 대한 적절한 액세스 권한 부여 비트 세트를 제공하는 경우에도 동일한 결과를 얻을 수 있습니다.
각 아키텍처는 메모리 관리가 pte_t 항목 의 추가 비트를 수정할 수 있도록 두 가지, 즉 추가 비트가 보관되는 데이터 유형 __pgprot 와 비트를 수정하는 pte_modify 함수를 제공해야 합니다. 위의 전처리기 기호는 적절한 항목을 선택하는 데 사용됩니다. 커널은 또한 메모리 페이지의 아키텍처 종속 상태를 쿼리하고 설정하는 다양한 기능을 정의합니다. 특정 기능에 대한 하드웨어 지원이 부족하기 때문에 모든 프로세서에서 모든 기능을 정의할 수 있는 것은 아닙니다.
pte_present는 페이지 테이블 진입점이 가리키는 페이지가 메모리에 존재하는지 확인합니다. 예를 들어 이 기능은 페이지 가 교체되었는지 감지하는 데 사용할 수 있습니다. pte_dirty는 페이지 테이블 항목과 관련 된 페이지가 더티(dirty), 즉 해당 내용인지 확인합니다. 지난번에 커널을 확인한 이후 수정되었습니다. 이 함수는 pte_present가 페이지를 사용할 수 있음을 확인한 경우에만 호출될 수 있습니다. pte_write는 커널이 페이지에 쓸 수 있는지 확인합니다.
pte_file은 파일 내용에 대한 다른 보기를 제공하는 비선형 매핑에 사용됩니다. 페이지 테이블 조작(이 메커니즘은 섹션 4.7.3에서 자세히 설명합니다). 그만큼함수는 페이지 테이블 항목이 그러한 매핑에 속하는지 확인합니다. pte_file은 pte_present가 false를 반환하는 경우에만 호출될 수 있습니다 . 즉, 페이지 테이블 항목과 관련된 페이지가 메모리에 존재 하지 않습니다 . 일반 코드는 pte_file 에 의존하므로 아키텍처가 비선형 매핑을 지원하지 않는 경우에도 정의해야 합니다. 이 경우 함수는 항상 0을 반환합니다.
PTE 항목을 조작하기 위해 제공되는 모든 기능의 요약은 표 3-3에서 찾을 수 있습니다.
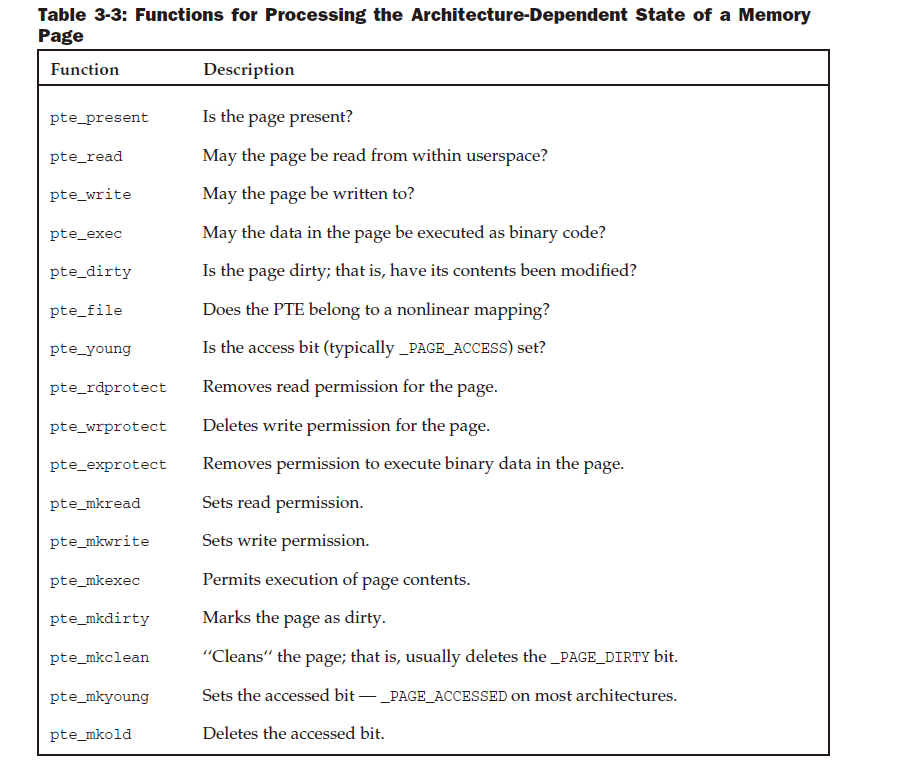
함수는 페이지에 대한 쓰기 권한과 같은 특정 속성을 설정, 삭제 및 쿼리하기 위해 세 개의 그룹으로 표시되는 경우가 많습니다. 커널은 페이지 데이터에 대한 액세스가 쓰기, 읽기 및 실행 권한을 통해 세 가지 다른 방식으로 규제될 수 있다고 가정합니다. (실행 권한은 페이지 바이너리 데이터가 프로그램이 실행되는 것과 동일한 방식으로 기계어 코드로 실행될 수 있음을 나타냅니다.) 그러나 이 가정은 일부 CPU의 경우 너무 낙관적입니다. IA-32 프로세서는 읽기 및 쓰기를 허용하는 두 가지 제어 모드만 지원합니다. 이 경우 아키텍처 종속 코드는 원하는 의미를 최대한 에뮬레이션하려고 시도합니다.
3.3.2 Creating and Manipulating Entries¶
표 3-4에는 새 페이지 테이블 항목을 생성하는 모든 기능이 나열되어 있습니다.
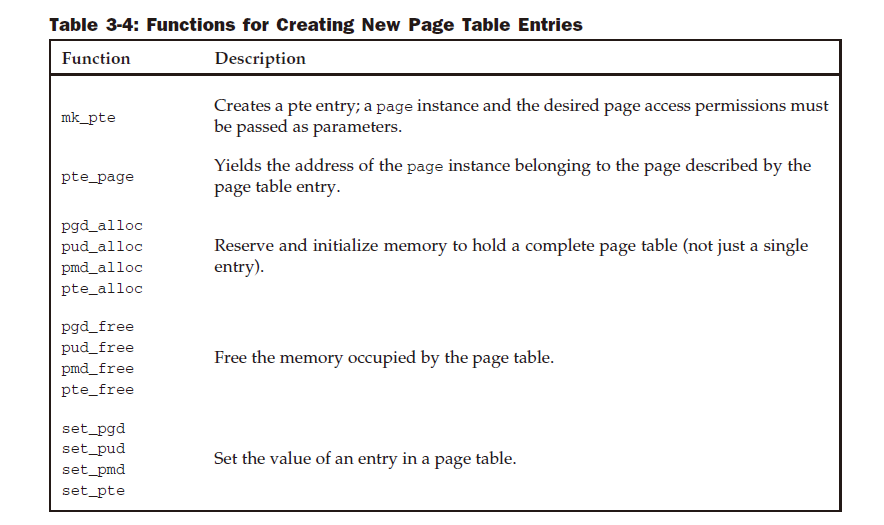
테이블의 함수는 메모리 관리 코드가 페이지 테이블을 생성하고 삭제할 수 있도록 모든 아키텍처에서 구현되어야 합니다.
3.4 Initialization of Memory Management¶
메모리 관리의 맥락에서 초기화는 여러 가지 의미를 가질 수 있습니다. 많은 CPU에서는 사용 가능한 메모리를 감지하고 이를 커널에 등록하기 전에 IA-32 시스템에서 보호 모드 로 전환하는 등 Linux 커널에 적합한 메모리 모델을 명시적으로 설정해야 합니다 . 초기화 과정에서 메모리 관리 등의 데이터 구조를 설정하는 것도 필요합니다. 메모리 관리가 완전히 완료되기 전에 커널에 메모리가 필요하기 때문입니다.
초기화되면 부팅 프로세스 중에 간단한 추가 형태의 메모리 관리가 사용되며 그 후에는 삭제됩니다. 메모리 관리 초기화의 CPU 관련 부분은 커널 구조에 대한 관심을 거의 드러내지 않고 단순히 어셈블리 언어 프로그래밍의 모범 사례인 기본 아키텍처의 사소하고 미묘한 세부 사항을 많이 사용하므로 이 섹션에서는 ini에 대해서만 살펴보겠습니다. 더 높은 수준에서 작업을 수행합니다. 핵심 측면은 섹션 3.2.2에서 소개된 pg_data_t 데이터 구조(및 그 하위 구조)의 초기화입니다. 왜냐하면 이는 이미 기계 독립적이기 때문입니다. 앞서 언급한 프로세서 관련 작업의 주요 목적은 총 메모리 양을 조사하고 시스템의 개별 노드와 영역 간에 메모리를 공유하는 방법을 조사하는 것입니다.
3.4.1 Data Structure Setup¶
데이터 구조의 초기화 는 다양한 하위 시스템이 작동하도록 하기 위해 커널 로딩 후에 실행되는 start_kernel 전역 시작 루틴 내에서 시작됩니다 . 메모리 관리는 매우 중요한 커널 구성 요소이므로 메모리 감지 및 시스템 내 배포 방법 설정에 대한 기술적인 세부 사항을 담당하는 아키텍처별 설정 직후 거의 즉시 초기화됩니다(섹션 3.4.2에서 구현을 간략하게 다룹니다).
IA-32 시스템 의 시스템 종속 초기화). 이 시점에서 각 시스템 메모리 모드에 대해 pgdat_t 인스턴스가 생성되어 노드에 메모리가 얼마나 있는지, 노드 영역에 어떻게 분산되는지에 대한 정보를 보유합니다. 모든 플랫폼에 구현된 아키텍처별 NODE_DATA 매크로 는 인스턴스 번호를 참조하여 NUMA 노드와 연결된 pgdat_t 인스턴스를 쿼리하는 데 사용됩니다 .
Prerequisites¶
대부분의 시스템에는 메모리 노드가 하나만 있으므로 아래에서는 이러한 유형의 시스템만 검토합니다. 그러한 시스템의 상황은 어떻습니까? 메모리 관리 코드의 이식성을 보장하기 위해(UMA 및 NUMA 시스템에서 모두 사용할 수 있도록) 커널은 mm/page_alloc.c 에 pg_data_t ( contig_page_data라고 함) 의 단일 인스턴스를 정의하여 모든 시스템 메모리를 관리합니다. 파일 경로 이름에서 알 수 있듯이 이는 CPU별 구현이 아닙니다. 실제로 대부분의 아키텍처에서 채택됩니다. 이제 NODE_DATA 구현이 더욱 간단해졌습니다. <mmzone.h> #define NODE_DATA(nid) (&contig_page_data)
매크로에는 NUMA 노드를 선택하기 위한 공식 매개변수가 있지만 항상 동일한 데이터가 반환됩니다. 즉, 의사 노드가 하나만 있습니다. 커널은 또한 아키텍처 종속 초기화 코드가 numnodes 변수를 시스템에 존재하는 노드 수로 설정했다는 사실에 의존할 수 있습니다. UMA 시스템에서는 (공식) 노드가 하나만 존재하므로 이 숫자는 1입니다. 컴파일 시 전처리기 문은 특정 구성에 대한 올바른 정의를 선택합니다.
System Start¶
그림 3-8은 start_kernel 의 코드 흐름도를 보여줍니다 . 여기에는 메모리 관리와 관련된 시스템 초기화 기능만 포함됩니다.
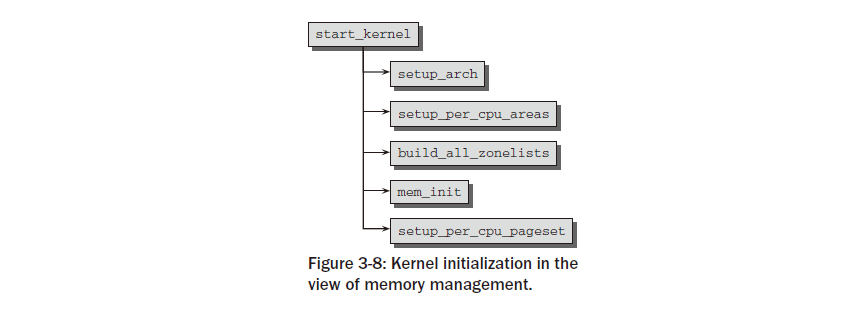
먼저 해당 작업을 다음과 같이 요약한 후 아래 섹션에서 호출되는 함수를 자세히 살펴보겠습니다.
setup_arch 는 무엇보다도 ini를 담당하는 아키텍처별 설정 함수입니다. 부팅 할당자의 초기화. SMP 시스템에서 setup_per_cpu_areas는 정적으로 정의된 CPU별 변수를 초기화합니다. 소스 코드에( per_cpu 매크로 사용) 시스템의 각 CPU에 대해 별도의 복사본이 있습니다. 이런 종류의 변수는 커널 바이너리의 별도 섹션에 저장됩니다. setup_per_cpu_areas 의 목적은 각 시스템 CPU에 대해 이러한 데이터의 복사본을 생성하는 것입니다.
이 함수는 SMP가 아닌 시스템에서는 null 연산입니다.
build_all_zonelists는 는 노드 및 영역 데이터 구조를 설정합니다(아래 참조). mem_init는 bootmem 할당자를 비활성화하고 잠시 설명한 대로 실제 메모리 관리 기능으로의 전환을 수행하는 또 다른 아키텍처별 함수입니다.
kmem_cache_init는 작은 메모리 영역에 대한 커널 내 할당자를 초기화합니다. setup_per_cpu_pageset은 위에서 언급한 구조체 영역 의 페이지 집합 배열 중 첫 번째 배열 요소에 메모리를 할당합니다 . 첫 번째 배열 요소를 할당한다는 것은 즉 첫 번 째 시스템 프로세서에 대한 할당을 의미합니다. 시스템의 모든 메모리 영역이 고려됩니다. 이 함수는 또한 섹션 3.5.3에서 자세히 설명한 hot-n-cold 할당자에 대한 제한을 설정하는 역할도 합니다. SMP 시스템에 있는 다른 CPU의 페이지 세트 배열 구성원은 활성화될 때 초기화 됩니다.
Node and Zone Initialization¶
build_all_zonelists는 노드와 해당 영역을 관리하는 데 필요한 데이터 구조를 구축합니다. 흥미롭게도 이는 NUMA 또는 UMA 시스템에서 실행되는지 여부에 관계없이 위에 소개된 매크로 및 추상화 메커니즘을 통해 구현될 수 있습니다. 이는 실행된 기능이 NUMA 시스템용과 UMA 시스템용의 두 가지 형태로 제공되기 때문에 가능합니다. 이 작은 트릭은 커널에서 자주 사용되므로 간략하게 설명하겠습니다. 컴파일 타임 구성에 따라 특정 작업을 다르게 수행해야 한다고 가정해 보겠습니다. 한 가지 가능성은 두 가지 다른 함수를 사용하고 일부 전처리기 조건을 사용하여 호출될 때마다 적절한 함수를 선택합니다.
void do_something() { … #ifdef CONFIG_WORK_HARD do_work_fast(); #else do_work_at_your_leisure(); #endif … } 이렇게 하려면 함수가 호출될 때마다 전처리기를 사용해야 하므로 커널 개발자는 이 접근 방식을 나쁜 스타일로 간주합니다.
훨씬 더 우아한 해결책은 선택한 구성에 따라 기능 자체를 다르게 정의하는 것입니다.
#ifdef CONFIG_WORK_HARD void do_work() { /* Get going, fast! / … } #else void do_work() { / Relax, take it easy */ … } #endif
동시에 활성화될 수 없기 때문에 두 구현 모두에 동일한 이름이 사용된다는 점에 유의하세요. 적절한 함수를 호출하는 것은 이제 일반 함수를 호출하는 것보다 더 복잡하지 않습니다.
void do_something() { … do_work(); /* Work hard or not, depending on configuration /* … } 분명히 이 변형은 훨씬 더 읽기 쉽고 커널 개발자가 항상 선호합니다(사실 첫 번째 스타일을 사용하는 패치는 메인라인 커널에 진입하는 데 매우 어려움을 겪을 것입니다). 구역 목록 설정으로 돌아가 보겠습니다. 현재 우리가 관심을 갖고 있는 build_all_zonelists 부분 (페이지 할당자에 대한 페이지 그룹 이동성 확장을 위해 수행할 작업이 더 있지만 이에 대해서는 아래에서 별도로 논의하겠습니다) 은 모든 작업을 __build_all_zonelists에 위임 합니다 . 시스템의 각 NUMA 노드에 대한 build_zonelists .
mm/page_alloc.c static int __build_all_zonelists(void *dummy) { int nid; for_each_online_node(nid) { pg_data_t *pgdat = NODE_DATA(nid); build_zonelists(pgdat); … } return 0; }
for_each_online_node는 시스템의 모든 활성 노드를 반복합니다. UMA 시스템에는 노드가 하나만 있으므로 build_zonelists는 전체 메모리에 대한 영역 목록을 생성하기 위해 한 번만 호출됩니다. NUMA 시스템은 노드 수만큼 함수를 호출해야 합니다. 각 호출은 서로 다른 노드에 대한 영역 데이터를 생성합니다. build_zonelists는 노드 메모리 구성에 대한 모든 기존 정보를 포함하고 새로 생성된 데이터 구조를 보유하는 pgdat_t 인스턴스 에 대한 포인터를 매개변수로 기대합니다 .
UMA 시스템에서 NODE_DATA는 contig_page_data 의 주소를 반환합니다 .
이 기능의 임무는 현재 처리 중인 노드 영역과 시스템의 다른 노드 사이에 순위 순서를 설정하는 것입니다. 그런 다음 이 순서에 따라 메모리가 할당됩니다. 원하는 노드 영역에 사용 가능한 메모리가 없는 경우 이는 중요합니다. 커널이 높은 메모리를 할당하려는 예를 살펴보겠습니다. 먼저 현재 노드의 highmem 영역에서 적절한 크기의 여유 세그먼트를 찾으려고 시도합니다. 실패하면 노드의 일반 메모리 영역을 살펴봅니다. 이것도 실패하면 노드의 DMA 영역에서 할당을 시도합니다. 세 개의 로컬 영역 중 어느 곳에서도 여유 공간을 찾을 수 없으면 다른 노드를 찾습니다. 이 경우 대체 노드는 기본 노드와 최대한 가까워야 비로컬 메모리 액세스로 인한 성능 손실을 최소화할 수 있습니다. 커널은 메모리 계층 구조를 정의하고 먼저 ‘저렴한’ 메모리 할당을 시도합니다. 이것이 실패하면 점차적으로 액세스 및 용량 측면에서 ‘더 비용이 많이 드는’ 메모리 할당을 시도합니다. 높은 메모리(highmem) 범위는 커널의 어떤 부분도 이 영역에서 할당된 메모리에 의존하지 않기 때문에 가장 저렴합니다. highmem 영역이 가득 차면 커널에 부정적인 영향이 없습니다. 이것이 바로 highmem 영역이 먼저 채워지는 이유입니다. 일반 메모리의 상황은 다릅니다. 많은 커널 데이터 구조가 이 영역에 보관되어야 하며 highmem에 보관할 수 없습니다. 따라서 일반 메모리가 완전히 가득 차면 커널은 심각한 상황에 직면하게 됩니다. 결과적으로 덜 중요한 highmem 영역에 사용 가능한 메모리가 없을 때까지 이 영역에서 메모리가 할당되지 않습니다.
주변기기와 시스템 간의 데이터 전송에 사용되는 DMA 영역은 가장 비용이 많이 드는 영역입니다. 따라서 이 영역의 메모리 할당은 최후의 수단입니다. 또한 커널은 현재 메모리 노드에서 볼 수 있는 대체 노드 간의 순위 순서를 정의합니다. 이는 현재 노드의 모든 영역이 가득 찼을 때 대체 노드를 결정하는 데 도움이 됩니다. 커널은 설명된 계층 구조를 데이터 구조로 표현하기 위해 pg_data_t 의 zonelist 요소 배열을 사용합니다 .
<mmzone.h> typedef struct pglist_data { … struct zonelist node_zonelists[MAX_ZONELISTS]; … } pg_data_t; #define MAX_ZONES_PER_ZONELIST (MAX_NUMNODES * MAX_NR_ZONES) struct zonelist { … struct zone *zones[MAX_ZONES_PER_ZONELIST + 1]; // NULL delimited };
node_zonelists 배열은 가능한 모든 영역 유형 에 대해 별도의 항목을 사용할 수 있도록 합니다. 이 항목에는 구조가 아래에 설명되어 있는 zonelist 유형의 대체 목록이 포함되어 있습니다 . 대체 목록은 모든 노드의 모든 영역을 포함해야 하기 때문에 MAX_NUMNODES 항목과 목록 끝을 표시하는 null 포인터에 대한 추가 요소로 구성됩니다 .
대체 계층 구조 생성 작업은 각 NUMA 노드에 대한 데이터 구조를 생성하는 build_zonelists 에 위임됩니다. 관련 pg_data_t 인스턴스에 대한 포인터를 매개변수로 필요합니다. 코드를 자세히 논의하기 전에 위에서 언급한 내용 중 하나를 상기해 보겠습니다. 논의를 UMA 시스템으로 제한했는데 왜 여러 NUMA 노드를 고려해야 합니까? 실제로 아래 표시된 코드는 CONFIG_NUMA가 설정된 경우 커널에 의해 다른 변형으로 대체됩니다 . 그러나 아키텍처가 UMA 시스템에서 불연속 또는 희소 메모리 옵션을 선택할 수도 있습니다. 이는 주소 공간에 큰 구멍이 있는 경우 유용할 수 있습니다. 이러한 구멍으로 인해 생성된 메모리 ‘블록’은 NUMA에서 제공하는 데이터 구조를 사용하여 가장 잘 처리할 수 있습니다. 이것이 바로 우리가 여기서 그들을 다루어야 하는 이유입니다. 대규모 외부 루프는 먼저 모든 노드 영역을 반복합니다. 각 루프 패스는 대체 목록이 보관되어 있는 zonelist 배열 에서 i번째 영역 에 대한 영역 항목을 찾습니다 .
mm/page_alloc.c static void __init build_zonelists(pg_data_t *pgdat) { int node, local_node; enum zone_type i,j; local_node = pgdat->node_id; for (i = 0; i < MAX_NR_ZONES; i++) { struct zonelist *zonelist; zonelist = pgdat->node_zonelists + i; j = build_zonelists_node(pgdat, zonelist, 0, j); … }
node_zonelists 의 배열 요소는 C에서 완전히 합법적인 관행인 포인터 조작을 통해 처리됩니다. 실제 작업은 build_zonelist_node에 위임됩니다. 호출되면 먼저 로컬 노드 내에서 대체 순서를 생성합니다.
mm/page_alloc.c static int __init build_zonelists_node(pg_data_t *pgdat, struct zonelist *zonelist, int nr_zones, enum zone_type zone_type) { struct zone *zone; do { zone = pgdat->node_zones + zone_type; if (populated_zone(zone)) { zonelist->zones[nr_zones++] = zone; } zone_type–; } while (zone_type >= 0); return nr_zones; }
대체 목록 항목은 영역을 지정하는 zone_type 매개변수를 통해 정렬됩니다.어떤 메모리가 가장 잘 사용되며 표시된 대로 maximum_zone을 사용하여 계산됩니다 . 하나를 가질 수 있다는 것을 기억하십시오 다음 값 중 하나: ZONE_HIGHMEM, ZONE_NORMAL, ZONE_DMA 또는 ZONE_DMA32. nr_zone 은 새 항목 채우기가 시작되는 대체 목록의 위치입니다. 발신자가 없기 때문에 0을 전달했습니다. 아직 목록에 항목이 없습니다. 그런 다음 커널은 비용이 많이 드는 영역부터 비용이 저렴한 영역까지 모든 영역을 반복합니다. 각 단계에서 populated_zone은 다음을 보장합니다 . 선택한 영역에 대해 zone->present_pages가 0보다 큽니다 . 즉,존. 그렇다면 이전에 결정된 영역 인스턴스에 대한 포인터가 내의 현재 위치에 추가됩니다. 구역 목록 zonelist->zones. 구역 목록의 현재 위치는 nr_zone에 보관됩니다. 각 단계가 끝나면 영역 유형이 1씩 감소합니다. 즉, 더 비용이 많이 드는 영역으로 설정됩니다.유형. 예를 들어 시작 영역이 ZONE_HIGHMEM 인 경우 1씩 감소하면 다음 영역 유형이 보장됩니다. 사용된 값은 ZONE_NORMAL입니다 . ZONE_HIGHMEM, ZONE_NORMAL 및 ZONE_DMA 영역이 있는 시스템을 고려해 보세요 . 첫 번째 실행에서는 build_zonelists_node에는 다음이 할당됩니다.
zonelist->zones[0] = ZONE_HIGHMEM; zonelist->zones[1] = ZONE_NORMAL; zonelist->zones[2] = ZONE_DMA;
그림 3-9는 시스템의 노드 2에 대한 대체 목록이 연속적으로 채워지는 경우를 보여줍니다. 시스템에는 총 4개의 노드가 있습니다 (numnodes = 4). k = ZONE_HIGHMEM 도 적용됩니다.
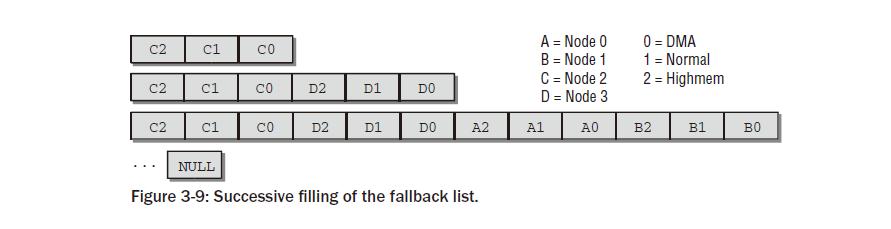
첫 번째 단계 이후 목록의 할당 대상은 highmem, 일반 메모리, 마지막으로 두 번째 노드의 DMA 영역입니다.
그런 다음 커널은 시스템에 있는 다른 노드의 영역이 대체 대상으로 사용되는 순서를 설정해야 합니다.
mm/page_alloc.c static void __init build_zonelists(pg_data_t *pgdat) { … for (node = local_node + 1; node < MAX_NUMNODES; node++) { j = build_zonelists_node(NODE_DATA(node), zonelist, j, i); } for (node = 0; node < local_node; node++) { j = build_zonelists_node(NODE_DATA(node), zonelist, j, i); } zonelist->zones[j] = NULL; } } }
첫 번째 루프는 처리 중인 노드보다 번호가 높은 모든 노드를 연속적으로 반복합니다. 이 예에는 0, 1, 2, 3이라는 번호가 붙은 4개의 노드가 있으므로 노드 번호 3만 남습니다. build_zonelists_node 에 의해 대체 목록에 새 항목이 추가됩니다 . 여기서 j 의 의미 가 작용합니다. 로컬 노드에서 대체 대상을 찾은 후 변수 값은 3이었습니다. 이는 새 항목의 시작 위치로 사용됩니다. 3번 노드도 3개의 zone으로 구성된 경우 build_zonelists 호출 후의 상황은 그림 3-9의 두 번째 단계와 같습니다. 그런 다음 두 번째 for 루프는 현재 노드보다 숫자가 낮은 모든 노드에 대한 항목을 생성합니다 . 이 예에서 이러한 노드에는 숫자 0과 1이 있습니다. 이 노드에도 3개의 영역이 있는 경우 대체 목록 상황은 그림 3-9의 하단과 같습니다. 영역 구성은 시스템의 다양한 노드에서 다를 수 있으므로 대체 목록의 항목 수는 정확히 알 수 없습니다. 따라서 마지막 항목에는 목록의 끝을 명시적으로 표시하기 위해 널 포인터가 할당됩니다. 총 N 개 노드 중 임의의 노드 m 에 대해 커널은 항상 폴백 노드에 대해 m, m + 1, m + 2, … , N, 0, 1, … , m 1 순서를 선택합니다. 이는 어떤 노드도 과도하게 사용되지 않도록 보장합니다(예를 들어 m과 관계없이 변경되지 않는 대체 목록과 비교할 때 ). 그림 3-10은 4개의 노드가 있는 시스템의 세 번째 노드에 대해 구축된 대체 목록을 보여줍니다.

3.4.2 Architecture-Specific Setup¶
IA-32 시스템에서 메모리 관리 초기화는 어떤 측면에서는 프로세서 아키텍처와 관련된 몇 가지 역사적 장애물을 극복해야 하는 매우 미묘한 작업입니다. 예를 들어, 여기에는 프로세서를 일반 모드에서 보호 모드 로 전환 하여 32비트 환경에 대한 CPU 액세스 권한을 부여하는 것이 포함됩니다. 이는 16비트 8086 프로세서와의 호환성이 중요했던 시절의 유산입니다. 마찬가지로 페이징은 기본적으로 활성화되지 않으며 수동으로 활성화해야 합니다. 예를 들어 프로세서의 cr0 레지스터를 조작해야 합니다 . 그러나 이러한 미묘함은 우리에게 관심이 없습니다. 해당 참조 설명서가 참조됩니다. IA-32 아키텍처에 초점을 맞춘다고 해서 다음에 설명된 내용이 커널에서 지원하는 다른 모든 아키텍처와 완전히 분리된다는 의미는 아닙니다. 정반대의 경우가 있습니다. 많은 세부 사항이 IA-32 아키텍처에 고유하더라도 많은 다른 아키텍처가 유사한 방식으로 작업을 수행합니다. 예를 들어 하나의 특정 아키텍처를 선택하기만 하면 됩니다. IA-32는 꽤 오랫동안 사용되었을 뿐만 아니라 Linux에서 처음 지원하는 아키텍처이기도 하므로 이는 커널의 일반 설계에 반영됩니다. 커널이 64비트 플랫폼을 지향하는 경향이 분명하지만 많은 측면이 여전히 IA-32 루트로 추적될 수 있습니다. IA-32 아키텍처를 예로 선택한 또 다른 이유는 실용적인 목적을 위한 것입니다. 주소 공간은 4GiB에 불과하므로 모든 주소는 비교적 간결한 16진수 숫자로 설명할 수 있습니다. 64비트 아키텍처에 필요한 긴 값. 흥미롭게도 IA-32 아키텍처는 더 이상 커널 2.6.24부터 별도의 아키텍처로 존재하지 않습니다! 이는 AMD64 아키텍처와 병합되어 새로운 통합 x86 아키텍처를 형성했습니다. 이제 둘 다 단일 아키텍처별 디렉터리인 Arch/x86 으로 제한되지만 여전히 많은 차이점이 남아 있습니다. 이것이 바로 많은 파일이 IA-32의 경우 file_32.c , AMD64의 경우 file_64.c라는 두 가지 변형으로 제공되는 이유입니다 . 각 하위 아키텍처에 대해 서로 다른 두 개의 파일이 존재한다는 것은 일시적으로만 힘든 일입니다. 향후 개발에서는 최종적으로 단일 파일에 두 아키텍처 모두에 대한 코드가 포함되도록 보장할 것입니다. 통합 아키텍처는 AMD64 아키텍처(그 이상)를 커널이 지원하는 가장 중요한 아키텍처 중 하나로 승격시키기 때문에 IA-32와 비교하여 AMD64의 아키텍처별 세부 사항이 어떻게 다른지도 고려할 것입니다. 커널이 지원하는 아키텍처의 수가 많기 때문에 여기서 모든 아키텍처에 대한 구체적인 세부 사항을 논의하는 것은 불가능합니다. 그러나 다음에서 하나의 32비트 아키텍처와 하나의 64비트 아키텍처를 고려하면 Linux가 두 세계에서 작업을 수행하는 방식을 맛보고 다른 아키텍처의 접근 방식을 이해하기 위한 기초를 마련할 수 있습니다.
Arrangement of the Kernel in Memory¶
개별 메모리 초기화 작업을 논의하기 전에 부트 로더가 커널을 메모리에 복사하고 초기화 루틴의 어셈블러 부분이 완료된 후 RAM의 상황을 조사해야 합니다. 나는 커널이 컴파일 시간에 결정되는 물리적 RAM의 고정 위치에 로드되는 기본 사례에 집중합니다. 크래시 덤프 메커니즘이 활성화된 경우 물리적 RAM에서 커널 바이너리의 초기 위치를 구성하는 것도 가능합니다. 또한 일부 임베디드 시스템에는 이 기능이 필요합니다. 구성 이 경우 PHYSICAL_START 옵션은 PHYSICAL_ALIGN 구성 옵션에 의해 지정된 물리적 정렬에 따라 RAM의 위치를 결정합니다.
또한 커널은 재배치 가능한 바이너리 로 구축될 수 있으며 이 경우 컴파일 타임에 제공된 물리적 시작 주소는 완전히 무시됩니다. 부트로더는 커널을 어디에 넣을지 결정할 수 있습니다. 두 옵션 모두 특수한 경우에만 필요하거나 여전히 실험적인 것으로 간주되므로 더 이상 논의하지 않겠습니다.
그림 3-11은 커널 이미지의 다양한 부분이 상주하는 최소 메가바이트의 물리적 RAM 메모리를 보여줍니다.

그림은 물리적 메모리의 첫 번째 메가바이트를 보여줍니다. 정확히 필요한 양은 커널 바이너리의 크기에 따라 다릅니다. 처음 4,096KiB(첫 번째 페이지 프레임)는 BIOS용으로 예약되는 경우가 많기 때문에 생략됩니다. 다음 640KiB는 원칙적으로 사용할 수 있지만 커널 로딩에는 다시 사용되지 않습니다. 그 이유는 이 영역 바로 뒤에 다양한 ROM 범위가 매핑되는 시스템(일반적으로 시스템 BIOS 및 그래픽 카드 ROM)용으로 예약된 영역이 있기 때문입니다. 이 영역에는 쓸 수 없습니다. 그러나 커널은 항상 연속적인 메모리 범위에 로드되어야 하며, 이는 RAM 메모리의 시작 주소가 커널 이미지의 시작 위치로 사용된 경우 640KiB보다 작은 커널에서만 가능합니다. 이러한 문제를 해결하기 위해 IA-32 커널은 0x100000을 시작 주소로 사용합니다. 이는 RAM 메모리의 첫 번째 메가바이트 시작에 해당합니다. 이 시점에서는 전체 커널을 보유할 만큼 충분한 연속 메모리가 있습니다. 커널이 차지하는 메모리는 여러 섹션으로 분할되며 그 경계는 변수에 보관됩니다. ext 및 _etext 는 컴파일된 텍스트가 포함된 텍스트 섹션의 시작 및 끝 주소입니다. 커널 코드. 대부분의 커널 변수가 보관되는 데이터 섹션은 _etext 와 _edata 사이에 위치합니다. 커널 부팅 프로세스가 완료된 후 더 이상 필요하지 않은 초기화 데이터(예: 0으로 초기화된 모든 정적 전역 변수를 포함하는
BSS 세그먼트)는 _edata 에서 _end 까지 확장되는 마지막 섹션에 보관됩니다 . 커널 초기화가 완료되면 대부분의 데이터가 메모리에서 제거되어 애플리케이션을 위한 더 많은 공간을 확보할 수 있습니다. 간격이 나누어져 있습니다
제거할 수 있는 것과 제거할 수 없는 것을 제어하기 위해 더 작은 하위 간격으로 분할하지만 이는 현재 우리의 목적에 중요하지 않습니다.
섹션 경계를 정의하는 데 사용되는 변수는 커널 소스 코드 (arch/x86/kernel/setup_32.c) 에 정의되어 있지만 이 시점에서는 변수에 할당된 값이 없습니다. 이것은 단순히 불가능합니다. 컴파일러는 컴파일 타임에 커널의 크기를 어떻게 알 수 있습니까? 정확한 값은 개체 파일이 링크될 때만 설정되며, 그런 다음 바이너리 파일에 패치됩니다. 이 작업은 커널 메모리 레이아웃도 정의되는 arch/arch/vmlinux.ld.S (IA-32의 경우 파일은 arch/x86/vmlinux_32.ld.S) 에 의해 제어됩니다 .
각 구성에는 커널의 활성화된 부분과 사용되지 않는 부분에 따라 다양한 크기의 텍스트 및 데이터 섹션이 있으므로 정확한 값은 커널 구성에 따라 다릅니다. 시작 주소 (_text) 만 항상 동일합니다.
커널이 컴파일될 때마다 System.map 이라는 파일이 생성되어 소스 기본 디렉터리에 저장됩니다. 커널에 정의된 다른 모든 (전역) 변수, 프로시저 및 함수의 주소 외에도 이 파일에는 그림 3-11에 표시된 상수 값도 포함됩니다.
wolfgang@meitner> cat System.map … c0100000 A _text … c0381ecd A _etext … c04704e0 A _edata … c04c3f44 A _end
모든 값 에는 사용자 주소 공간과 커널 주소 공간 간의 표준 3:1 분할이 선택된 경우 커널 세그먼트의 시작 주소인 오프셋 0xC0000000 이 있습니다. RAM 메모리는 이 주소에서 시작하는 선형 매핑으로 가상 주소 공간에 매핑되므로 주소는 가상 주소입니다. 해당 물리적 주소는 0xC0000000에서 빼서 얻습니다.
/proc/iomem은 RAM 메모리가 구분되는 섹션에 대한 정보도 제공합니다.
wolfgang@meitner> cat /proc/iomem 00000000-0009e7ff : System RAM 0009e800-0009ffff : reserved 000a0000-000bffff : Video RAM area 000c0000-000c7fff : Video ROM 000f0000-000fffff : System ROM 00100000-17ceffff : System RAM 00100000-00381ecc : Kernel code 00381ecd-004704df : Kernel data …
커널 이미지는 첫 번째 메가바이트 (0x00100000) 위에서 시작됩니다. 코드 크기는 약 2.5MiB이고, 데이터 섹션은 약 0.9MiB를 차지합니다.
AMD64 시스템에도 동일한 정보가 제공됩니다. 여기서 커널은 첫 번째 페이지 프레임 이후 2MiB에서 시작하고 실제 메모리는 0xffffffff80000000 부터 가상 주소 공간에 매핑됩니다 . System.map 의 관련 항목은 다음과 같습니다.
wolfgang@meitner> cat System.map ffffffff80200000 A _text … ffffffff8041fc6f A _etext … ffffffff8056c060 A _edata … ffffffff8077548c A _end
이 정보는 실행 중인 커널에 대한 /proc/iomem 에도 포함되어 있습니다 .
root@meitner # cat /proc/iomem … 00100000-cff7ffff : System RAM 00200000-0041fc6e : Kernel code 0041fc6f-0056c05f : Kernel data 006b6000-0077548b : Kernel bss …
Initialization Steps¶
커널이 메모리에 로드되고 어셈블러 초기화 부분이 완료된 후 커널이 수행해야 하는 시스템별 단계는 무엇입니까? 그림 3-12는 개별 작업의 코드 흐름도를 보여줍니다.

그림에는 메모리 관리와 관련된 함수 호출만 포함되어 있습니다. 다른 모든 내용은 이 문맥에서 중요하지 않으므로 생략합니다. 섹션 3.4.1에서 이미 언급한 대로 setup_arch가 start_kernel 내에서 호출된다는 점을 기억하세요 . machine_special_memory_setup 은 먼저 시스템이 차지하는 메모리 영역과 사용 가능한 메모리 영역이 포함된 목록을 생성하기 위해 호출됩니다. 이 정보를 얻는 방법은 IA-32 제품군의 ‘하위 아키텍처’’ 간에 약간 다르기 때문에11 커널은 include/asm-x86/mach-type/setup에 정의된 시스템별 기능을 제공합니다. 씨. type은 default, voyager 또는 visws를 나타낼 수 있습니다 . 나는 기본 상황만을 논의한다. 이 경우 BIOS에서 제공하고 개별 메모리 영역을 표시하는 맵이 사용됩니다.
이는 NUMA 개념과 동일한 영역이 아니지만 시스템 ROM(예: ACPI 기능)이 차지하는 영역입니다.
시스템이 부팅되면 발견된 영역이 커널 함수 print_memory_map에 의해 표시됩니다.
wolfgang@meitner> dmesg … BIOS-provided physical RAM map: BIOS-e820: 0000000000000000 - 000000000009e800 (usable) BIOS-e820: 000000000009e800 - 00000000000a0000 (reserved) BIOS-e820: 00000000000c0000 - 00000000000cc000 (reserved) BIOS-e820: 00000000000d8000 - 0000000000100000 (reserved) BIOS-e820: 0000000000100000 - 0000000017cf0000 (usable) BIOS-e820: 0000000017cf0000 - 0000000017cff000 (ACPI data) BIOS-e820: 0000000017cff000 - 0000000017d00000 (ACPI NVS) BIOS-e820: 0000000017d00000 - 0000000017e80000 (usable) BIOS-e820: 0000000017e80000 - 0000000018000000 (reserved) BIOS-e820: 00000000ff800000 - 00000000ffc00000 (reserved) BIOS-e820: 00000000fff00000 - 0000000100000000 (reserved) …
BIOS에서 이 정보를 제공하지 않는 경우(일부 이전 시스템의 경우일 수 있음) 커널 자체는 0~640KiB 및 1MiBend 범위의 메모리를 사용 가능한 것으로 표시하는 테이블을 생성 합니다 . 그런 다음 커널은 mem=XXX[KkmM], highmem=XXX[kKmM] 또는 memmap=XXX[KkmM]””@XXX[KkmM] 인수와 같은 인수에 집중하여 parse_cmdline_early 를 사용하여 명령줄을 분석합니다 . 커널이 잘못된 값을 계산하거나 BIOS에서 잘못된 값을 제공하는 경우 관리자는 사용 가능한 메모리 크기를 덮어쓰거나 메모리 영역을 수동으로 정의할 수 있습니다. 이 옵션은 구형 컴퓨터에만 적용됩니다. highmem=은 감지된 highmem 크기
값을 덮어쓸 수 있도록 허용합니다.
RAM 구성이 매우 큰 시스템에서 사용 가능한 RAM 크기를 제한하는 데 사용할 수 있습니다. 때로는 성능이 향상되기 때문입니다.
다음 주요 단계는 두 가지 버전이 있는 setup_memory 에서 수행됩니다. 하나는 연속 메모리가 있는 시스템용( arch/x86/kernel/setup_32.c) 이고 다른 하나는 연속되지 않은 메모리가 있는 시스템용( arch/x86/mm/discontig_32.c)입니다. 구현은 다르지만 둘 다 동일한 효과를 갖습니다.
노드당 사용 가능한 물리적 페이지 수가 결정됩니다. bootmem 할당자가 초기화됩니다(섹션 3.4.3에서는 할당자의 구현을 설명합니다). 상세히). 그런 다음 첫 번째 사용자 공간 프로세스를 실행할 때 필요한 초기 RAM 디스크 등을 위해 다양한 메모리 영역이 예약됩니다.
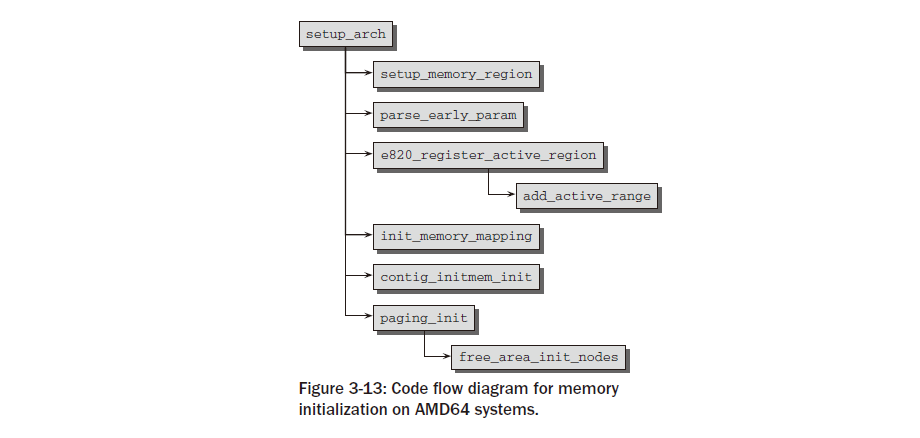
paging_init는 커널 페이지 테이블을 초기화하고 페이징을 활성화합니다. IA-32 시스템에서는 기본적으로 활성화되어 있지 않기 때문입니다. 12 실행 비활성화 보호는 프로세서에서 지원되고 커널이 PAE 지원으로 컴파일된 경우에도 활성화됩니다. 안타깝게도 이 기능을 다른 방법으로는 사용할 수 없습니다. 또한 이 함수는 pagetable_init를 호출하여 물리적 메모리를 커널 주소 공간으로 직접 매핑하는 것이 초기화되도록 보장합니다. 낮은 메모리의 모든 페이지 프레임은 PAGE_OFFSET 위의 가상 메모리 영역에 직접 매핑됩니다 . 이를 통해 커널은 더 이상 페이지 테이블을 처리하지 않고도 사용 가능한 메모리의 상당 부분을 처리할 수 있습니다. paging_init 및 그 뒤에 있는 전체 메커니즘 에 대한 자세한 내용은 아래에서 설명합니다. zone_sizes_init를 호출하면 시스템의 모든 노드의 pgdat_t 인스턴스가 초기화됩니다 . 먼저 add_active_range를 사용하여 비교적 간단한 사용 가능한 물리적 메모리 목록을 준비합니다 . 그런 다음 아키텍처 독립적인 함수 free_are_init_nodes는 이 정보를 사용하여 본격적인 커널 데이터 구조를 준비합니다. 이는 커널이 런타임에 페이지 프레임을 관리하는 방법에 대해 많은 영향을 미치는 매우 중요한 단계이므로 섹션 3.5.3에서 자세히 설명합니다. 그림 3-13의 코드 흐름도에서 볼 수 있듯이 메모리 관련 초기화 순서는 AMD64 시스템에서 매우 유사합니다. 기본 메모리 설정에는 머신 유형별 처리가 필요하지 않지만 언제든지 setup_memory_region을 사용하여 수행할 수 있습니다. 사용 가능한 RAM에 대한 정보는 BIOS에서 제공되는 소위 E820 맵을 통해 제공됩니다. 초기 부팅 프로세스와 관련된 명령줄 옵션을 구문 분석한 후 e820_register_active_region 에서 호출된 add_active 에 의해 사용 가능한 메모리의 간단한 목록이 생성됩니다 . 이는 차례로 위의 E820 맵을 구문 분석하여 제공된 정보를 살펴봅니다. 그런 다음 커널은 init_memory_mapping을 호출하여 사용 가능한 물리적 메모리를 PAGE_OFFSET부터 시작하는 커널의 가상 주소 공간 부분에 직접 매핑합니다 . contig_initmem_init는 bootmem 할당자를 활성화하는 역할을 담당합니다. 목록의 마지막 함수인 paging_init는 실제로 잘못된 이름입니다. 이 함수는 페이징을 초기화하지 않지만 우리 목적에 적합하지 않은 희소 메모리 시스템에 대한 일부 설정 루틴을 처리해야 합니다. 그러나 중요한 점은 이 함수가 IA-32 사례에서처럼 커널이 물리적 페이지 프레임을 관리하는 데 필요한 데이터 구조를 초기화하는 free_area_init_nodes 도 호출한다는 것입니다. 이는 아키텍처 독립적인 함수이며 위에서 언급한 add_active_range가 제공하는 정보에 의존한다는 점을 기억하세요 . free_area_init_nodes가 메모리를 설정하는 방법에 대한 자세한 설명은 섹션 3.5.3에 나와 있습니다.
Initialization of Paging¶
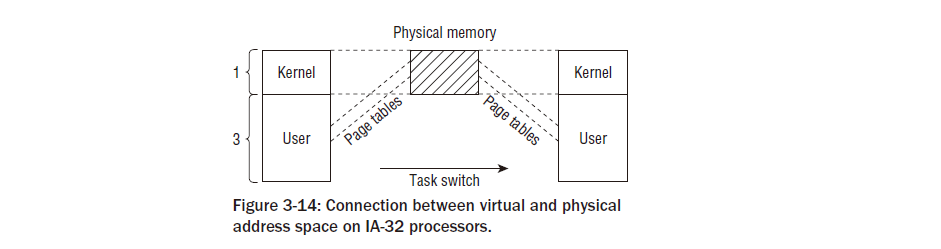
paging_init는 커널에서만 사용할 수 있고 사용자 공간에서는 액세스할 수 없는 페이지 테이블을 설정하는 일을 담당합니다. 이는 일반 응용 프로그램과 커널 자체 사이에서 메모리에 대한 액세스를 규제하는 방식에 광범위한 영향을 미칩니다. 따라서 구현을 자세히 살펴보기 전에 함수의 목적을 설명하는 것이 중요합니다. 1장에서 설명한 대로 IA-32 시스템에서 커널은 일반적으로 사용 가능한 총 가상 주소 공간인 4GiB를 3:1의 비율로 나눕니다. 하위 3GiB는 사용자 모드 응용 프로그램에 사용할 수 있으며 상위 기가바이트는 예약되어 있습니다. 커널 전용입니다. 커널의 가상 주소 공간을 할당할 때 현재 시스템 컨텍스트는 관련이 없지만 각 프로세스에는 고유한 특정 주소 공간이 있습니다. 이 분할의 주요 이유는 다음과 같습니다. 사용자 응용 프로그램 실행이 커널 모드로 전환되면(시스템 호출이 사용되거나 주기적인 타이머 인터럽트가 생성되는 경우 항상 발생함) 커널은 안정적인 환경에 내장되어야 합니다. 따라서 주소 공간의 일부를 커널에만 할당하는 것이 중요합니다.
물리적 페이지는 커널 주소 공간의 시작 부분에 매핑되므로 커널은 복잡한 페이지 테이블 작업 없이 직접 액세스할 수 있습 니다. 모든 물리적 페이지가 사용자 공간 프로세스에 액세스할 수 있는 주소 공간에 매핑된 경우 시스템에서 여러 응용 프로그램이 실행되고 있으면 심각한 보안 문제가 발생할 수 있습니다. 그러면 각 애플리케이션은 물리적 RAM에 있는 다른 프로세스의 메모리 영역을 읽고 수정할 수 있습니다. 분명히 이것은 어떤 대가를 치르더라도 방지되어야 합니다. 사용자 영역 프로세스에 사용되는 가상 주소 부분은 모든 작업 전환에 따라 변경되지만 커널 부분은 항상 동일합니다. 상황은 그림 3-14에 요약되어 있다.
Division of Address Space¶
3:1 비율의 주소 공간 분할은 커널 주소 공간 자체가 다양한 섹션으로 분할되므로 커널의 상황을 대략적으로 반영한 것일 뿐입니다. 그림 3-15에서는 상황을 그래픽으로 보여줍니다.
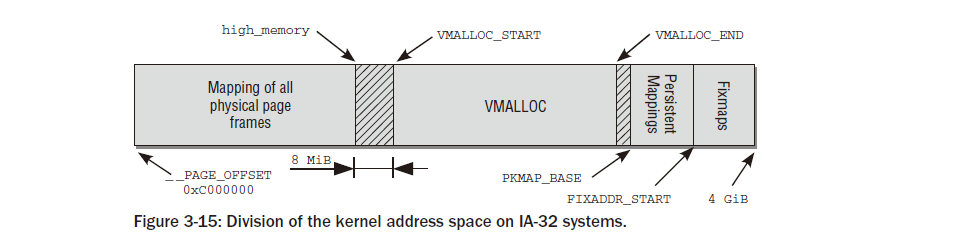
그림은 4GB의 가상 주소 공간을 관리하는 데 사용되는 페이지 테이블 항목의 구조를 보여줍니다. 이는 가상 주소 공간 의 각 영역의 목적을 나타내며 물리적 RAM 할당과는 아무런 관련이 없습니다.
주소 공간의 첫 번째 섹션은 시스템의 모든 물리적 페이지를 커널의 가상 주소 공간에 매핑하는 데 사용됩니다. 이 주소 공간은 0xC0000000 (자주 언급되는 3GiB) 의 오프셋에서 시작하기 때문에 각 가상 주소 x는 물리적 주소 x
0xC0000000 에 해당하므로 단순한 선형 이동입니다.
그림에서 볼 수 있듯이 직접 매핑 영역은 0xC0000000 에서 곧 설명할 정확한 값의 high_memory 주소 까지 확장됩니다 . 1장에서 설명한 것처럼 이 방식에는 문제가 있습니다. 커널의 가상 주소 공간은 1GiB로만 구성되므로 최대 1GiB의 RAM 메모리를 매핑할 수 있습니다. IA-32 시스템(PAE 제외)의 최대 메모리 구성이 최대 4GiB일 수 있다는 사실은 남은 메모리를 어떻게 처리할지에 대한 의문을 제기합니다. 여기에 나쁜 소식이 있습니다. 896MiB보다 크면 커널은 전체 물리적 메모리를 한 번에 매핑할 수 없습니다. 13 이 값은 앞서 언급한 최대 제한인 1GiB보다 훨씬 작습니다.
커널은 곧 설명할 다른 목적을 위해 주소 공간의 마지막 128MiB를 예약해야 합니다. 896MiB의 직접 RAM 매핑에 이러한 128MiB를 추가하면 총 가상 커널 주소 공간은 1,024MiB = 1GiB가 됩니다. 커널은 자주 사용되는 두 가지 약어 ‘normal’과 ‘highmem’을 사용하여 직접 매핑할 수 있는 페이지와 매핑할 수 없는 페이지를 구별합니다. 커널 포트는 가상 커널 메모리의 ID 매핑 부분에서 물리적 주소와 가상 주소 간을 변환하기 위해 각 아키텍처에 대해 두 개의 매크로를 제공해야 합니다(결국 이는 플랫폼에 따른 작업입니다). __pa(vaddr)는 가상 주소 vaddr과 연결된 물리적 주소를 반환합니다 . __va(paddr)은 물리적 주소 paddr에 해당하는 가상 주소를 생성합니다.
두 함수 모두 void 포인터와 unsigned long 으로 작동합니다 . 두 데이터 유형 모두 메모리 주소 표현에 동일하게 유효하기 때문입니다. 주의: 이 함수는 가상 주소 공간의 임의 주소를 처리하는 데 유효 하지 않으며 ID 매핑 부분 에만 작동합니다! 이것이 바로 이들이 일반적으로 간단한 선형 변환으로 구현될 수 있고 페이지 테이블을 우회할 필요가 없는 이유입니다.
IA-32는 페이지 프레임을 PAGE_OFFSET 에서 시작하는 가상 주소 공간에 매핑하며 이에 따라 다음과 같은 간단한 변환으로 충분합니다.
include/asm-x86/page_32.h #define __pa(x) ((unsigned long)(x)-PAGE_OFFSET) #define __va(x) ((void *)((unsigned long)(x)+PAGE_OFFSET))
커널은 주소 공간의 마지막 128MiB를 어떤 목적으로 사용합니까? 그림 3-15에서 볼 수 있듯이 세 가지 용도로 사용됩니다.
1.물리적 메모리에서는 연속되지 않은 가상적으로 연속된 메모리 영역을 vmalloc 영역 에 예약할 수 있습니다 . 이 메커니즘은 일반적으로 사용자 프로세스에서 사용되지만 커널 자체는 가능한 한 연속되지 않은 물리적 주소를 피하려고 합니다. RAM이 아직 조각화되지 않은 경우 부팅 시 대부분의 대형 메모리 블록이 커널에 할당되기 때문에 일반적으로 성공합니다. 그러나 장기간 실행된 시스템에서는 커널에 물리적 메모리가 필요하지만 사용 가능한 공간이 연속되지 않는 상황이 발생할 수 있습니다. 이러한 상황의 대표적인 예는 모듈이 동적으로 로드되는 경우입니다.
2.영구 매핑은 highmem 영역의 비영구 페이지를 핵심. 섹션 3.5.8에서는 이 주제를 자세히 살펴봅니다.
3.Fixmap은 물리적 주소 공간에서 고정되었지만 자유롭게 선택할 수 있는 페이지와 연관된 가상 주소 공간 항목입니다. 고정된 공식을 통해 RAM 메모리와 연결된 직접 매핑된 페이지와 달리 가상 수정 맵 주소와 RAM 메모리 위치 간의 연결은 자유롭게 정의할 수 있으며 항상 커널에서 관찰됩니다.
이 컨텍스트에서는 두 개의 전처리기 기호가 중요합니다. __VMALLOC_RESERVE는 vmalloc 영역 의 크기를 설정 하고 MAXMEM은 커널에서 직접 주소를 지정할 수 있는 물리적 RAM의 가능한 최대 크기를 나타냅니다.
개별 영역으로의 메모리 분할은 그림 3-15에 표시된 상수를 통해 제어됩니다. 상수는 커널 및 시스템 구성에 따라 다른 값을 가질 수 있습니다. 직접 매핑의 경계는 high_memory로 지정됩니다.
arch/x86/kernel/setup_32.c static unsigned long __init setup_memory(void) { … #ifdef CONFIG_HIGHMEM high_memory = (void *) __va(highstart_pfn * PAGE_SIZE - 1) + 1; #else high_memory = (void *) __va(max_low_pfn * PAGE_SIZE - 1) + 1; #endif … }
max_low_pfn은 896MiB 미만인 시스템에 존재하는 메모리 페이지 수를 지정합니다. 또한 값은 896MiB에 맞는 최대 페이지 수로 제한됩니다(정확한 계산은 find_max_low_pfn에 제공됨). highmem 지원이 활성화된 경우 high_memory는 항상 896MiB인 두 메모리 영역 사이의 경계를 나타냅니다. 모든 RAM 페이지의 직접 매핑과 비연속 할당 영역 사이에는 최소 크기 VMALLOC_OFFSET 의 간격이 있습니다 .
include/asm-x86/pgtable_32.h #define VMALLOC_OFFSET (8*1024*1024)
이 간격은 커널 결함에 대한 보호 장치 역할을 합니다. 범위를 벗어난 주소에 액세스하는 경우 (더 이상 물리적으로 존재하지 않는 메모리 영역에 대한 의도하지 않은 액세스) 액세스가 실패하고 오류를 보고하기 위해 예외가 생성됩니다. vmalloc 영역이 직접 매핑 바로 뒤에 오면 액세스가 성공하고 오류가 발견되지 않습니다. 안정적인 작동에서는 이러한 추가 보호 조치가 필요하지 않지만 아직 성숙되지 않은 새로운 커널 기능을 개발할 때 유용합니다. VMALLOC_START 및 VMALLOC_END는 물리적으로 연속되지 않은 커널 매핑에 사용되는 vmalloc 영역의 시작과 끝을 정의합니다.
값은 상수로 직접 정의되지 않고 여러 매개변수에 따라 달라집니다.
include/asm-x86/pgtable_32.h #define VMALLOC_START (((unsigned long) high_memory + 2*VMALLOC_OFFSET-1) & ~(VMALLOC_OFFSET-1)) #ifdef CONFIG_HIGHMEM # define VMALLOC_END (PKMAP_BASE-2*PAGE_SIZE) #else # define VMALLOC_END (FIXADDR_START-2*PAGE_SIZE) #endif vmalloc 영역의 시작 주소는 가상 주소 공간 메모리가 얼마나 사용되는지에 따라 달라집니다. RAM의 직접 매핑(따라서 위에 정의된 high_memory 변수에 대한) 커널도두 영역 사이에 최소한 VMALLOC_OFFSET 의 간격이 있다는 사실 과vmalloc 영역은 VMALLOC_OFFSET으로 나누어지는 주소에서 시작됩니다 . 결과적으로 오프셋 값이 표시됩니다. 128MiB에서 135MiB 사이의 다양한 메모리 구성 수준은 표 3-5에 나와 있습니다. 오프셋이 새로 시작됩니다136MiB로 순환합니다.

vmalloc 영역이 끝나는 위치는 highmem 지원 활성화 여부에 따라 달라집니다. 그렇지 않으면 공간이 없습니다. RAM 메모리 전체가 영구적으로 매핑될 수 있기 때문에 지속적인 커널 매핑에 필요합니다. 따라서 구성에 따라 해당 영역은 영구 커널 매핑이 시작될 때 끝납니다.또는 Fixmap 영역의 시작 부분에 있습니다. 두 페이지는 항상 vmalloc 영역에 대한 안전 공백으로 남겨집니다. 영구 커널 매핑의 시작과 끝은 다음과 같이 정의됩니다.
include/asm-x86/highmem.h #define LAST_PKMAP 1024 #define PKMAP_BASE ( (FIXADDR_BOOT_START - PAGE_SIZE*(LAST_PKMAP + 1)) & PMD_MASK )
PKMAP_BASE는 시작 주소를 정의합니다(계산은 일부를 사용하여 수정맵 영역을 기준으로 수행됩니다). 곧 논의되는 상수). LAST_PKMAP은 데이터를 보관하는 데 사용되는 페이지 수를 정의합니다. 매핑. 마지막 메모리 섹션은 고정 매핑이 차지합니다. 임의의 위치를 가리키는 주소입니다. RAM 메모리에. 네 번째 기가바이트 시작 부분의 선형 매핑과 달리RAM 메모리의 가상 주소와 위치는 이러한 유형의 매핑으로 미리 결정되지는 않지만 가능합니다.나중에 변경할 수 없더라도 자유롭게 정의할 수 있습니다. Fixmap 영역은 가상 주소 공간을 채웁니다.바로 꼭대기까지요.
include/asm-x86/fixmap_32.h #define __FIXADDR_TOP 0xfffff000 #define FIXADDR_TOP ((unsigned long)__FIXADDR_TOP) #define __FIXADDR_SIZE (__end_of_permanent_fixed_addresses << PAGE_SHIFT) #define FIXADDR_START (FIXADDR_TOP - __FIXADDR_SIZE)
Fixmap 주소의 장점은 컴파일 시 주소가 커널 부팅 시 물리적 주소가 할당되는 상수처럼 작동한다는 것입니다. 이런 종류의 주소는 일반 포인터를 사용할 때보다 더 빠르게 역참조될 수 있습니다. 커널은 또한 컨텍스트 전환 중에 픽스맵의 페이지 테이블 항목이 TLB에서 플러시되지 않도록 보장하여 액세스가 항상 빠른 캐시 메모리를 통해 이루어지도록 합니다. 각 픽스맵 주소에 대해 상수가 생성되며 고정 주소 라는 열거형 목록에 나타나야 합니다 . include/asm-x86/fixmap_32.h enum fixed_addresses { FIX_HOLE, FIX_VDSO, FIX_DBGP_BASE, FIX_EARLYCON_MEM_BASE, #ifdef CONFIG_X86_LOCAL_APIC FIX_APIC_BASE, /* local (CPU) APIC) — required for SMP or not / #endif … #ifdef CONFIG_HIGHMEM FIX_KMAP_BEGIN, / reserved pte’s for temporary kernel mappings */ FIX_KMAP_END = FIX_KMAP_BEGIN+(KM_TYPE_NR*NR_CPUS)-1, #endif … FIX_WP_TEST, __end_of_fixed_addresses };
커널은 fixmap 상수의 가상 주소를 계산하기 위해 fix_to_virt 함수를 제공합니다.
include/asm-x86/fixmap_32.h static __always_inline unsigned long fix_to_virt(const unsigned int idx) { if (idx >= __end_of_fixed_addresses) __this_fixmap_does_not_exist(); return __fix_to_virt(idx); }
if 쿼리는 컴파일러 최적화 메커니즘에 의해 완전히 제거됩니다. 이는 함수가 인라인 함수 로 정의되고 쿼리에 상수만 사용되기 때문에 가능합니다. 그렇지 않으면 수정맵 주소가 일반 포인터보다 나을 것이 없기 때문에 이러한 최적화가 필요합니다. 필요한 Fixmap 주소가 유효한 영역에 있는지 확인하기 위해 공식적인 검사가 수행됩니다. __end_of_fixed_adresses 는 fixed_addresses 의 마지막 요소 이며 가능한 최대 수를 정의합니다. 커널이 유효하지 않은 주소에 액세스하는 경우 의사 함수 __this_fixmap_does_not_exist (정의가 존재하지 않음)가 호출됩니다.
커널이 링크되면 정의되지 않은 기호로 인해 이미지를 생성할 수 없다는 오류 메시지가 나타납니다. 결과적으로 이러한 종류의 커널 오류는 커널이 실행 중일 때가 아니라 컴파일 시간에 감지됩니다.
유효한 Fixmap 주소가 참조되면 if 쿼리의 비교 결과 양수 값이 생성됩니다. 두 비교 개체는 모두 상수이므로 쿼리를 실행할 필요가 없으므로 제거됩니다.
__fix_to_virt 는 매크로로 정의됩니다. fix_to_virt 의 인라인 속성 으로 인해 코드에서 fixmap 주소 쿼리가 실행되는 지점에 직접 복사됩니다. 이 매크로는 다음과 같이 정의됩니다. include/asm-x86/fixmap_32.h #define __fix_to_virt(x) (FIXADDR_TOP - ((x) << PAGE_SHIFT))
커널은 맨 위에서 시작하여 (보통 맨 아래에서 시작하지 않음) n 번째 픽스맵 항목 의 가상 주소를 결정하기 위해 n 페이지 뒤로 이동합니다. 다시 한번 강조하지만 이 계산에는 상수만 사용되므로 컴파일러는 컴파일 타임에 결과를 계산할 수 있습니다. 해당 가상 주소가 위치한 RAM의 주소는 위의 메모리 분할 결과 아직 점유되지 않았습니다. Fixmap 주소와 메모리의 물리적 페이지 사이의 연관은 set_fixmap(fixmap, page_nr) 및 set_fixmap_nocache (구현에 대해서는 논의되지 않음)에 의해 설정됩니다.그들은 단순히 페이지 테이블의 해당 항목을 RAM의 페이지와 연관시킵니다. set_fixmap 과 달리 set_fixmap_nocache는 때때로 필요하므로 관련 페이지에 대한 하드웨어 캐싱을 비활성화합니다. AMD64를 포함한 일부 다른 아키텍처도 수정 맵을 제공합니다.
Alternative Division¶
가상 주소 공간을 3:1 비율로 나누는 것이 유일한 옵션은 아닙니다. 모든 경계가 소스의 상수로 정의되므로 다른 구분을 선택하는 데 상대적으로 노력이 거의 필요하지 않습니다. 어떤 목적의 경우 주소 공간을 사용자 주소 공간에 2GiB, 커널 주소 공간에 2GiB로 대칭적으로 분할하는 것이 더 나을 수도 있습니다. 그런 다음 __PAGE_OFFSET을 일반적인 기본값인 0xC0000000 대신 0x80000000 으로 설정해야 합니다 . 이 분할은 시스템이 커널에는 많은 양의 메모리가 필요하지만 사용자 프로세스에는 적은 양의 메모리가 필요한 작업(이러한 작업은 드뭅니다)을 수행할 때 유용합니다. 메모리 분할 방법을 변경하려면 모든 사용자 공간 애플리케이션을 다시 컴파일해야 하므로 구성 명령문에는 원칙적으로는 쉽지만 메모리를 다르게 분할하는 옵션이 포함되어 있지 않습니다. 기본적으로 커널 소스를 수동으로 수정하여 메모리를 분할하는 것이 가능하지만 커널은 몇 가지 기본 분할 비율을 제공합니다.
__PAGE_OFFSET 은 다음과 같이 정의됩니다.
include/asm-x86/page_32.h #define __PAGE_OFFSET # ((unsigned long)CONFIG_PAGE_OFFSET)
표 3-6은 가상 주소 공간을 분할할 수 있는 모든 가능성과 매핑할 수 있는 최대 RAM 크기를 수집합니다 .. image:: ./img/table3_6.png 커널을 3:1이 아닌 비율로 분할하는 것은 특정 시나리오(예: 주로 커널에서 코드를 실행하는 시스템의 경우)에 적합할 수 있습니다. 네트워크 라우터를 생각해 보세요. 그러나 일반적인 경우에는 3:1 비율이 가장 좋습니다.
Splitting the Virtual Address Space¶
paging_init는 위에서 설명한 대로 가상 주소 공간을 분할하기 위해 부팅 프로세스 중에 IA-32 시스템에서 호출됩니다. 코드 흐름 다이어그램은 그림 3-16에 나와 있습니다.
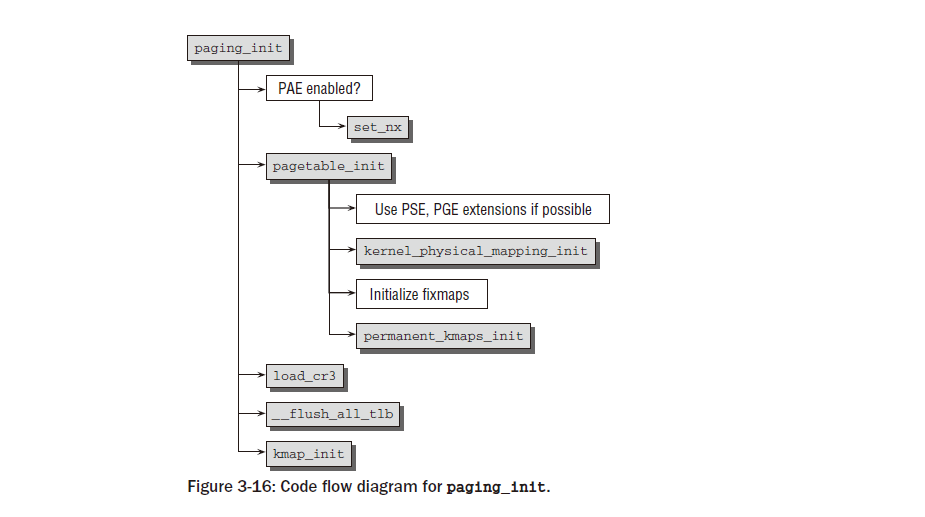
pagetable_init는 먼저 swapper_pg_dir을 기본으로 사용하여 시스템의 페이지 테이블을 초기화합니다 (이것은변수는 이전에 임시 데이터를 보유하는 데 사용되었습니다). 모든 최신 버전에서 두 가지 확장 기능 사용 가능그런 다음 IA-32 변형이 활성화됩니다(매우 오래된 Pentium 구현 중 일부만이 이를 지원하지 않습니다). 대용량 메모리 페이지를 지원합니다. 특별히 표시된 페이지의 크기는 일반적인 페이지 대신 4MiB입니다. 4KiB. 이 옵션은 커널 페이지가 교체되지 않기 때문에 커널 페이지에 사용됩니다. 증가페이지 크기는 더 적은 수의 페이지 테이블 항목이 필요하다는 것을 의미하며 이는 페이지 테이블에 긍정적인 영향을 미칩니다. TLB(변환 참조 버퍼)는 커널 데이터의 부담을 줄여줍니다.
가능하다면 커널 페이지에는 추가 속성 (_PAGE_GLOBAL) 이 제공됩니다 . __PAGE_GLOBAL 비트는 __PAGE_KERNEL 및 __PAGE_KERNEL_EXEC 변수 에서 활성화됩니다 . 이것들 변수는 페이지가 할당될 때 커널 자체에 대해 설정된 플래그를 지정합니다. 따라서 이러한 설정은 자동으로 커널 페이지로 전송됩니다. _PAGE_GLOBAL 비트 가 설정된 페이지의 TLB 항목은 컨텍스트 전환 중에 TLB에서 플러시되지 않습니다. 커널은 항상 가상 주소 공간의 동일한 위치에 존재하므로 시스템 성능이 향상되고 커널 데이터를 가능한 한 빨리 사용할 수 있어야 한다는 점에서 반가운 효과가 있습니다.
PAGE_OFFSET 기준으로 물리적 페이지(또는 위에서 설명한 첫 번째 896MiB)를 가상 주소 공간으로 매핑하는 것은 kernel_physical_mapping_init 의 도움으로 수행됩니다 . 커널은 다양한 페이지 디렉토리의 모든 관련 항목을 연속적으로 검색하고 포인터를 올바른 값으로 설정합니다. 그런 다음 수정 맵 항목과 영구 커널 매핑을 위한 영역이 설정됩니다. 다시 말하지만 이는 페이지 테이블을 적절한 값으로 채우는 것과 같습니다. pagetable_init 를 사용한 페이지 테이블 초기화가 완료 되면 cr3 레지스터에는 사용된 페이지 전역 디렉터리 (swapper_pg_dir)에 대한 포인터가 제공됩니다. 이는 새 페이지 테이블을 활성화하는 데 필요합니다. cr3 레지스터를 재할당하면 IA-32 시스템에 정확히 이러한 효과가 있습니다. TLB 항목도 여전히 부팅 메모리 할당 데이터를 포함하고 있으므로 플러시되어야 합니다. __flush_all_tlb는 필요한 작업을 수행합니다. 컨텍스트 전환 중 TLB 플러시와 달리 _PAGE_GLOBAL 비트가 있는 페이지도 플러시됩니다.
kmap_init는 전역 변수 kmap_pte를 초기화합니다. 커널은 이 변수를 사용하여 나중에 highmem 영역의 페이지를 커널 주소 공간에 매핑하는 데 사용되는 영역에 대한 페이지 테이블 항목을 저장합니다. 게다가 highmem 커널 매핑을 위한 첫 번째 Fixmap 영역의 주소는 전역 변수 kmem_vstart에 저장됩니다.
Initialization of the Hot-n-Cold Cache¶
섹션 3.2.2에서 이미 CPU당(또는 hot-n-cold) 캐시에 대해 언급했습니다. 여기서는 관련 데이터 구조의 초기화와 캐시 채우기를 제어하는 데 사용되는 ‘워터마크’ 계산을 다룹니다. 행동 zone_pcp_init 는 캐시 초기화를 담당합니다. 커널은 free_area_init_nodes 에서 함수를 호출하며 , 이 함수는 IA-32 및 AMD64 모두에서 부팅하는 동안 호출됩니다.
mm/page_alloc.c static __devinit void zone_pcp_init(struct zone *zone) { int cpu; unsigned long batch = zone_batchsize(zone); for (cpu = 0; cpu < NR_CPUS; cpu++) { setup_pageset(zone_pcp(zone,cpu), batch); } if (zone->present_pages) printk(KERN_DEBUG ” %s zone: %lu pages, LIFO batch:%lun”, zone->name, zone->present_pages, batch); }
zone_batchsize를 사용하여 배치 크기(최소 및 최대 채우기 수준 계산의 기초)가 결정되면 코드는 시스템의 모든 CPU를 반복하고 setup_pageset을 호출하여 각 per_cpu_pageset 인스턴스 의 상수를 채웁니다 . 이 함수가 호출될 때 사용되는 zone_pcp 매크로 는 현재 검사 중인 CPU와 연관된 영역의 페이지 세트 인스턴스를 선택합니다.
워터마크가 어떻게 계산되는지 자세히 살펴보겠습니다.
mm/page_alloc.c inline void setup_pageset(struct per_cpu_pageset p, unsigned long batch) { struct per_cpu_pages *pcp; memset(p, 0, sizeof(*p)); pcp = &p->pcp[0]; / hot / pcp->count = 0; pcp->high = 6 * batch; pcp->batch = max(1UL, 1 * batch); INIT_LIST_HEAD(&pcp->list); pcp = &p->pcp[1]; / cold*/ pcp->count = 0; pcp->high = 2 * batch; pcp->batch = max(1UL, batch/2); INIT_LIST_HEAD(&pcp->list); }
코드는 해당 영역에 있는 페이지의 약 1,000분의 25%에 해당하도록 배치를 계산합니다. 또한 시프트 연산은 계산된 값이 2n 1 형식을 갖도록 보장합니다. 왜냐하면 이것이 대부분의 시스템 로드에 대한 캐시 앨리어싱 효과를 최소화한다는 것이 경험적으로 확립되었기 때문입니다. fls 는 값의 마지막 세트 비트를 생성하는 시스템별 작업입니다. 이 정렬로 인해 결과 값이 영역 페이지의 1/1000 25%에서 벗어나게 됩니다. 배치 = 22 인 경우 최대 편차가 발생합니다. 22 + 11 1 = 32이므로 fls는 비트 5를 숫자의 마지막 세트 비트로 찾고 1 << 5 - 1 = 31을 찾습니다 . 왜냐하면 편차는 일반적으로 더 작기 때문입니다. , 모든 실제적인 목적을 위해 무시될 수 있습니다. 영역의 메모리가 512MiB를 초과하면 배치 크기가 증가하지 않습니다. 예를 들어 페이지 크기가 4,096KiB인 시스템의 경우 페이지가 131,072개 이상이면 이 제한에 도달합니다. 그림 3-17은 영역에 존재하는 페이지 수에 따라 배치 크기가 어떻게 변화하는지 보여줍니다. 배치 값은 배치가 캐시 제한을 계산하는 데 사용되는 방법을 고려할 때 의미가 있습니다.
mm/page_alloc.c inline void setup_pageset(struct per_cpu_pageset p, unsigned long batch) { struct per_cpu_pages *pcp; memset(p, 0, sizeof(*p)); pcp = &p->pcp[0]; / hot / pcp->count = 0; pcp->high = 6 * batch; pcp->batch = max(1UL, 1 * batch); INIT_LIST_HEAD(&pcp->list); pcp = &p->pcp[1]; / cold*/ pcp->count = 0; pcp->high = 2 * batch; pcp->batch = max(1UL, batch/2); INIT_LIST_HEAD(&pcp->list); }

그림 3-17: 다양한 페이지 크기에 대해 영역에 존재하는 메모리 양(왼쪽)에 따라 달라지는 배치 크기. 오른쪽 그래프는 영역에 있는 페이지 수에 대한 종속성을 보여줍니다. 핫 페이지에 사용되는 하한은 0이고 상한은 6*배치 이므로 커널이 캐시를 너무 많이 소모하지 않도록 하기 때문에 캐시의 평균 페이지 수는 약 4*배치 입니다. 그러나 배치*4는 전체 영역 페이지 수의 1/1000에 해당합니다. 이는 zone_batchsize가 전체 페이지의 1/1000에 대해 배치 크기를 25%로 최적화하려고 시도한 이유이기도 합니다. IA-32 프로세서의 L2 캐시 크기는 0.25~2MiB 범위이므로 이 공간에 맞는 것보다 더 많은 메모리를 핫 앤 콜드 캐시에 보관하는 것은 의미가 없습니다. 경험상 캐시 크기는 주 메모리 크기의 1/1000입니다. 현재 시스템에는 CPU당 1~2GiB의 RAM이 장착되어 있으므로 규칙이 합리적이라는 점을 고려하세요. 따라서 계산된 배치 크기는 핫 앤 콜드 캐시의 페이지가 CPU의 L2 캐시에 맞도록 허용할 가능성이 높습니다. 캐시에 보관되지 않은 콜드 페이지는 성능에 중요 하지 않은 작업(물론 이러한 작업은 커널에서 소수임)에만 사용되기 때문에 콜드 목록의 워터마크는 약간 낮습니다. 배치 값 의 두 배만 상한값으로 사용됩니다. pcp- >배치 크기는 목록을 다시 채워야 할 때 한 번에 사용되는 페이지 수를 결정합니다. 성능상의 이유로 단일 페이지가 아닌 전체 페이지 청크가 목록에 추가됩니다. 각 영역의 페이지 수는 부팅 로그에 표시된 대로 계산된 배치 크기와 함께 zone_pcp_init 끝에 출력됩니다 (아래 예에서 RAM이 4GiB인 시스템의 경우). .. image:: ./img/fig3_17.png
root@meitner # dmesg | grep LIFO DMA zone: 2530 pages, LIFO batch:0 DMA32 zone: 833464 pages, LIFO batch:31 Normal zone: 193920 pages, LIFO batch:31
Registering Active Memory Regions¶
위에서 구역 구조의 초기화는 광범위한 작업이라는 점을 언급했습니다. 다행히 이 작업은 모든 아키텍처에서 동일합니다. 2.6.19 이전의 커널 버전은 아키텍처별로 필요한 데이터 구조를 설정해야 했지만 그 동안 접근 방식은 더욱 모듈화되었습니다. 개별 아키텍처는 모든 활성 메모리 영역과 일반에 대한 매우 간단한 맵만 등록하면 됩니다. 그런 다음 코드는 이 정보로부터 기본 데이터 구조를 생성합니다. 개별 아키텍처는 커널에서 제공하는 일반 프레임워크에 의존하지 않고 자체적으로 모든 데이터 구조를 설정하기로 결정할 수 있습니다. IA-32와 AMD64 모두 커널이 어려운 작업을 수행하도록 하므로 이 가능성에 대해서는 더 이상 논의하지 않겠습니다. 일반 프레임워크가 제공하는 가능성을 활용하려는 아키텍처는 ARCH_POPULATES_NODE_MAP 구성 옵션을 설정해야 합니다. 모든 활성 메모리 영역이 등록된 후 나머지 작업은 일반 커널 코드에 의해 수행됩니다. 활성 메모리 영역은 단순히 홀이 포함되지 않은 메모리 영역입니다. 전역 변수 early_node_map에 지역을 등록하려면 add_active_range를 사용해야 합니다 .
mm/page_alloc.c static struct node_active_region __meminitdata early_node_map[MAX_ACTIVE_REGIONS]; static int __meminitdata nr_nodemap_entries;
현재 등록된 지역의 수는 nr_nodemap_entries로 표시됩니다. 개별 지역의 최대 수는 MAX_ACTIVE_REGIONS로 지정됩니다. 값은 CONFIG_MAX_ACTIVE_REGIONS를 사용하여 아키텍처별 코드로 설정할 수 있습니다 . 그렇지 않은 경우 커널은 기본적으로 256개의 활성 영역(또는 32개 이상의 노드가 있는 시스템에서 실행 중인 경우 NUMA 노드당 50개의 영역) 등록을 허용합니다. 각 지역은 다음 데이터 구조로 설명됩니다.
<mmzone.h> struct node_active_region { unsigned long start_pfn; unsigned long end_pfn; int nid; }; start_pfn 과 end_pfn은 연속된 영역의 첫 번째와 마지막 페이지 프레임을 나타내며, nid 는 메모리가 속한 노드의 NUMA ID입니다. UMA 시스템은 자연스럽게 이를 0으로 설정합니다. 활성 메모리 영역은 add_active_range에 등록됩니다.
mm/page_alloc.c void __init add_active_range(unsigned int nid, unsigned long start_pfn, unsigned long end_pfn)
인접한 두 지역이 등록되면 add_active_regions를 사용하여 두 지역이 하나로 병합되도록 합니다. 게다가 이 기능은 전혀 놀라운 일이 아닙니다. 그림 3-12 및 3-13에서 이 함수는 IA-32 시스템의 zone_sizes_init 와 AMD64 시스템의 e820_register_active_regions 에서 호출된다는 점을 상기해 보세요 . 따라서 이러한 기능에 대해 간략하게 설명하겠습니다.
Registering Regions on IA-32¶
add_active_range 호출 외에도 zone_sizes_init 함수는 페이지 프레임 측면에서 다양한 메모리 영역의 경계를 저장합니다.
arch/x86/kernel/setup_32.c void __init zone_sizes_init(void) { unsigned long max_zone_pfns[MAX_NR_ZONES]; memset(max_zone_pfns, 0, sizeof(max_zone_pfns)); max_zone_pfns[ZONE_DMA] = virt_to_phys((char *)MAX_DMA_ADDRESS) >> PAGE_SHIFT; max_zone_pfns[ZONE_NORMAL] = max_low_pfn; #ifdef CONFIG_HIGHMEM max_zone_pfns[ZONE_HIGHMEM] = highend_pfn; add_active_range(0, 0, highend_pfn); #else add_active_range(0, 0, max_low_pfn); #endif free_area_init_nodes(max_zone_pfns); }
MAX_DMA_ADDRESS는 DMA 작업에 가장 적합한 메모리 주소입니다. 상수는 PAGE_OFFSET+0x1000000으로 선언됩니다. 물리적 페이지는 PAGE_OFFSET 부터 시작하여 가상 페이지에 매핑되며 처음 16MiB(16진수 0x1000000 )가 DMA 작업에 적합하다는 점을 기억하세요. virt_to_phys를 사용한 변환은 물리적 메모리의 주소를 생성하고 PAGE_SHIFT 비트만큼 오른쪽으로 이동하면 이 수치를 페이지 크기로 효과적으로 나누고 DMA에 사용할 수 있는 페이지 수를 생성합니다. 당연히 IA-32는 4KiB의 페이지를 사용하므로 결과는 4,096입니다. max_low_pfn 및 highend_pfn은 이전에 채워졌던 낮은(3:1 주소 공간 분할이 사용되는 경우 일반적으로 896MiB 이하) 및 높은 메모리 범위에서 가장 높은 페이지 번호를 지정하는 전역 상수입니다. free_area_init_nodes 는 early_mem_map 과 max_zone_pfns 의 정보를 결합합니다 . 각 메모리 영역의 활성 범위가 선택되고 아키텍처 독립적인 데이터 구조가 구성됩니다.
Registering Regions on AMD64¶
사용 가능한 메모리 등록은 AMD64에서 두 가지 기능으로 분할됩니다. 활성 메모리 영역은 다음과 같이 등록됩니다.
arch/x86/kernel/e820_64.c e820_register_active_regions(int nid, unsigned long start_pfn, unsigned long end_pfn) { unsigned long ei_startpfn; unsigned long ei_endpfn; int i;
for (i = 0; i < e820.nr_map; i++) if (e820_find_active_region(&e820.map[i], start_pfn, end_pfn, &ei_startpfn, &ei_endpfn)) add_active_range(nid, ei_startpfn, ei_endpfn); }
기본적으로 코드는 BIOS에서 제공하는 모든 지역을 반복하고 각 항목에 대한 활성 지역을 찾습니다. 이는 IA-32 변형과 달리 add_active_range가 여러 번 호출될 수 있다는 점에서 흥미롭습니다. max_zone_pfns 채우기는 paging_init 에 의해 처리됩니다 .
arch/x86/mm/init_64.c void __init paging_init(void) { unsigned long max_zone_pfns[MAX_NR_ZONES]; memset(max_zone_pfns, 0, sizeof(max_zone_pfns)); max_zone_pfns[ZONE_DMA] = MAX_DMA_PFN; max_zone_pfns[ZONE_DMA32] = MAX_DMA32_PFN; max_zone_pfns[ZONE_NORMAL] = end_pfn; … free_area_init_nodes(max_zone_pfns); }
16비트 및 32비트 DMA 영역에 대한 페이지 프레임 경계는 16MiB 및 4GiB 범위를 페이지 프레임으로 변환하는 전처리기 기호에 저장됩니다. include/asm-x86/dms_64.h /* 16MB ISA DMA zone / #define MAX_DMA_PFN ((16*1024*1024) >> PAGE_SHIFT) / 4GB broken PCI/AGP hardware bus master zone */ #define MAX_DMA32_PFN ((4UL*1024*1024*1024) >> PAGE_SHIFT)
end_pfn은 감지된 가장 큰 페이지 프레임 번호입니다. AMD64에는 높은 메모리가 필요하지 않으므로 max_zone_pfns 의 해당 항목은 NULL 로 유지됩니다 .
Address Space Setup on AMD64¶
- AMD64 시스템의 주소 공간 설정은 어떤 측면에서는 IA-32보다 쉽지만 불행히도 다른 측면에서는 더 어렵습니다.
- 64비트 가상 주소 공간을 사용하면 높은 메모리와 같은 이상한 현상을 피할 수 있지만 또 다른 요인으로 인해 상황이 복잡해집니다.
즉, 64비트로 확장된 주소 공간이 너무 커서 현재 이를 필요로 하는 애플리케이션이 없습니다. 따라서 현재 구현에서는 폭이 48비트에 불과한 더 작은 물리적 주소 공간을 구현합니다. 이를 통해 유연성을 잃지 않고 주소 변환을 단순화하고 속도를 높일 수 있습니다. 248 비트는 여전히 256TiB 또는 256 × 1,024GiB의 주소 지정을 허용합니다. 이는 Firefox에도 충분합니다! 물리적 주소 공간은 48비트로 제한되어 있지만 가상 주소 공간의 주소 지정은 여전히 64비트 포인터로 수행되므로 공간은 공식적으로 64비트에 걸쳐 있어야 합니다. 하지만 이로 인해 문제가 발생합니다. 가상 주소 공간의 일부 부분은 실제로 48비트만 처리할 수 있기 때문에 주소를 지정할 수 없습니다.
향후 하드웨어 구현에서는 더 큰 물리적 주소 공간을 지원할 수 있으므로 주소 공간의 다른 하위 집합에 주소를 지정할 수 없는 하위 집합을 단순히 다시 매핑하는 것은 불가능합니다. 모든 프로그램이 일반 주소 공간의 일부로 다시 매핑되기 위해 구현되지 않은 주소 공간에 대한 포인터에 의존한다고 가정합니다. 더 많은 물리적 주소 비트를 구현하는 차세대 프로세서는 다른 동작으로 이어져 기존 코드를 모두 손상시킵니다. 분명히 구현되지 않은 영역에 액세스하는 것은 프로세서에 의해 방해되어야 합니다. 이를 시행할 수 있는 한 가지 방법은 실제 주소 공간보다 큰 모든 가상 주소의 사용을 금지하는 것입니다. 그러나 이는 하드웨어 설계자가 선택한 접근 방식이 아닙니다. 그들의 솔루션은 그림 3-18에 설명된 기호 확장 접근 방식을 기반으로 합니다 . .. image:: ./img/fig3_18.png
가상 주소의 처음 47비트, 즉 [0, 46]은 임의로 설정될 수 있다. 그러나 [47, 63] 범위의 비트는 항상 동일한 값을 가져야 합니다. 모두 0이거나 모두 1입니다. 이러한 주소를 표준이라고 합니다 . 그들은 전체 주소 공간을 하위 절반, 상위 절반, 그 사이의 금지 영역의 세 부분으로 나눕니다. 두 부분이 합쳐져 정확히 248 비트 에 달하는 주소 공간을 형성합니다 . 아래쪽 절반의 주소 공간은 [0x0, 0x0000 7FFF FFFF FFFF] 이고 위쪽 절반의 하위 집합은 [0xFFF 800 0000 0000, 0xFFFF FFFF FFFF FFFF]입니다. 0x0000 7FFF FFFF FFFF 는 하위 47비트가 1로 설정되고 다른 비트는 모두 설정되지 않은 이진수이므로 주소 지정이 불가능한 영역 앞의 마지막 주소입니다. 마찬가지로 0xFFFF 8000 0000 0000에는 비트 [48, 63]이 설정되어 있으므로 상위 절반의 첫 번째 유효한 주소입니다. 가상 주소 공간을 두 부분으로 분할하는 것은 커널이 두려워하는 것이 아닙니다. 이는 실제로 대부분의 아키텍처에서 주소 공간을 커널과 사용자 부분으로 분리하는 데 의존합니다. 15 따라서 AMD64에 의해 시행된 분리는 자연스럽게 분리를 구현하는 데 적합합니다 . 사용자와 커널 주소 공간 사이. 그림 3-19는 Linux 커널이 AMD64 시스템에서 가상 주소 공간을 배치하는 방법을 보여줍니다.16 액세스 가능한 주소 공간의 전체 아래쪽 절반은 사용자 공간으로 사용되고 전체 위쪽 절반은 커널용으로 예약됩니다. 두 공간 모두 거대하기 때문에 분할 비율 등을 조작할 필요가 없습니다. 커널 주소 공간은 프로세서에 의해 일반 보호 예외가 발생하는 주소 공간의 비정규 부분에 대한 우발적인 액세스를 방지하기 위해 가드 구멍으로 시작됩니다. 물리적 페이지는 PAGE_OFFSET부터 커널 공간으로 ID 매핑됩니다 . 246 비트( MAXMEM 에서 지정 ) 는 물리적 페이지 프레임용으로 예약되어 있습니다. 이는 16TiB의 메모리에 해당합니다.
include/asm-x86/pgtable_64.h #define __AC(X,Y) (X##Y) #define _AC(X,Y) __AC(X,Y) #define __PAGE_OFFSET _AC(0xffff810000000000, UL) #define PAGE_OFFSET __PAGE_OFFSET #define MAXMEM _AC(0x3fffffffffff, UL)

_AC는 주어진 상수에 접미사를 표시하는 데 사용됩니다. 예를 들어 _AC(17,UL) 은 (17UL) 이 되며 , 이는 상수를 unsigned long으로 만듭니다. 이는 C 코드에서 유용할 수 있지만 _AC 매크로가 접미사 없이 주어진 값을 직접 확인 하는 어셈블러 코드에서는 허용되지 않습니다 . ID 매핑된 영역과 VMALLOC_START 와 VMALLOC_END 사이에 있는 vmalloc 영역 영역 사이에 또 다른 가드 홀이 배치됩니다.
include/asm-x86/pgtable_64.h #define VMALLOC_START _AC(0xffffc20000000000, UL) #define VMALLOC_END _AC(0xffffe1ffffffffff, UL)
vmalloc 영역 바로 뒤에 있는 VMM(가상 메모리 맵) 영역 의 크기 는 1TiB입니다. 희소 메모리 모델을 사용하는 커널에서만 유용합니다. pfn_to_page 및 page_to_pfn을 통해 가상 페이지 프레임 번호와 실제 페이지 프레임 번호 간 변환은 물리적 주소 공간의 모든 홀을 고려해야 하기 때문에 이러한 시스템에서는 비용이 많이 들 수 있습니다. 커널 2.6.24부터 mm/sparse-memmap.c의 일반 코드로 더 간단한 솔루션이 제공됩니다. VMM 영역의 페이지 테이블은 물리적 메모리에 있는 모든 구조체 페이지 인스턴스가 해당 영역에 매핑되지 않도록 설정됩니다. 어떤 구멍. 이는 활성 메모리 영역만 포함되는 사실상 연속적인 영역을 제공합니다. 따라서 MMU는 더 이상 구멍을 고려할 필요가 없는 가상 숫자와 실제 숫자 간의 변환을 자동으로 지원합니다. 이로 인해 작업이 상당히 가속화됩니다. 실제 페이지 번호와 가상 페이지 번호 간의 변환을 단순화하는 것 외에도 이 기술은 필요한 계산도 마찬가지로 단순화되므로 보조 기능 virt_to_page 및 page_address를 구현하는 데 이점이 있습니다 . 커널 텍스트는 CONFIG_PHYSICAL_START 에서 제공하는 컴파일 시간 구성 가능 오프셋을 사용하여 __START_KERNEL_MAP 에서 시작하는 영역에 매핑됩니다 . 재배치 가능한 커널에는 오프셋 설정이 필요합니다.
그러나 결과 주소 __START_KERNEL이 __KERNEL_ALIGN 과 일치하는지 확인됩니다 . 지역커널 바이너리용으로 예약된 KERNEL_TEXT_SIZE 는 현재 40MiB로 정의되어 있습니다.
include/asm-x86/page_64.h #define __PHYSICAL_START CONFIG_PHYSICAL_START #define __KERNEL_ALIGN 0x200000 #define __START_KERNEL (__START_KERNEL_map + __PHYSICAL_START) #define __START_KERNEL_map _AC(0xffffffff80000000, UL) #define KERNEL_TEXT_SIZE (40*1024*1024) #define KERNEL_TEXT_START _AC(0xffffffff80000000, UL)
마지막으로 모듈을 매핑할 공간이 제공되어야 하며 이는 MODULES_VADDR 영역에 있습니다. MODULES_END 로 :
include/asm-x86/pgtable_64.h #define MODULES_VADDR _AC(0xffffffff88000000, UL) #define MODULES_END _AC(0xfffffffffff00000, UL) #define MODULES_LEN (MODULES_END - MODULES_VADDR)
사용 가능한 메모리 양은 MODULES_LEN에서 계산됩니다. 현재 이는 대략적으로1,920MiB.
3.4.3 Memory Management during the Boot Process¶
메모리 관리가 아직 초기화되지 않았지만 커널은 초기화 중에 메모리를 예약해야 합니다. 다양한 데이터 구조를 생성할 수 있도록 부팅 프로세스를 수행합니다. 메모리를 할당하는 bootmem 할당자이를 위해 초기 부팅 단계가 사용됩니다. 분명히 필요한 것은 성능과 보편성보다는 단순성에 초점을 맞춘 시스템입니다. 따라서 커널 개발자는 가장 간단한 방법으로 첫 번째 적합 할당자를 구현하기로 결정했습니다. 부팅 단계에서 메모리를 관리하는 방법. 시스템에 존재하는 물리적 페이지 수만큼의 비트가 포함된 비트맵을 사용하여 관리합니다. 페이지. 비트 값 1은 사용된 페이지를 나타내고 0은 사용 가능한 페이지를 나타냅니다. 메모리를 예약해야 할 때 할당자는 충분한 수의 연속 페이지를 보유할 수 있을 만큼 큰 위치(말 그대로 첫 번째 최선 또는 첫 번째 적합)를 찾을 때까지 비트맵을 비트 단위로 스캔합니다. 위치. 이 절차는 각 비트 체인을 처음부터 바로 스캔해야 하기 때문에 매우 효율적이지 않습니다.배당. 따라서 커널이 완전히 초기화되면 메모리 관리에 사용할 수 없습니다.슬랩, 슬러브 또는 슬롭 할당자와 함께 사용되는 버디 시스템은 다음과 같이 훨씬 더 나은 대안입니다. 섹션 3.5.5에서 논의되었습니다.
Data Structures¶
첫 번째 할당자라도 일부 데이터를 관리해야 합니다. 커널은 bootmem_data 의 인스턴스를 제공합니다. 이 목적을 위한 구조(시스템의 각 노드에 대한)입니다. 물론 구조에 필요한 메모리는 동적으로 예약할 수 없지만 컴파일 시 이미 커널에 할당되어야 합니다.
예약은 UMA 시스템에서 CPU 독립적인 방식으로 구현됩니다(NUMA 시스템은 아키텍처별 솔루션을 사용함). bootmem_data 구조는 다음 과 같이 정의됩니다: <bootmem.h> typedef struct bootmem_data { unsigned long node_boot_start; unsigned long node_low_pfn; void *node_bootmem_map; unsigned long last_offset; unsigned long last_pos; unsigned long last_success; struct list_head list; } bootmem_data_t;
아래에서 페이지라는 용어를 사용할 때는 항상 실제 페이지 프레임을 의미합니다. node_boot_start는 시스템의 첫 번째 페이지 번호를 보유합니다. 대부분의 Architec에서는 0입니다. tures. node_low_pfn 은 관리할 수 있는 물리 주소 공간의 마지막 페이지 번호 곧장; 즉, ZONE_NORMAL의 끝입니다. node_bootmem_map은 할당 비트맵이 저장되는 메모리 영역에 대한 포인터이다. IA-32 시스템에서는 커널 이미지 바로 뒤의 메모리 영역이 이 목적으로 사용됩니다. 해당 주소는 연결 중에 커널 이미지에 자동으로 패치되는 _end 변수에 보관됩니다.
last_pos 는 마지막으로 할당된 페이지 번호입니다. last_offset은 페이지 메모리 전체가 요청되지 않은 경우 페이지 내 오프셋으로 사용됩니다. 이를 통해 bootmem 할당자는 전체 페이지보다 작은 메모리 영역을 할당할 수 있습니다(버디 시스템은 이를 수행할 수 없습니다). last_success는 할당이 마지막으로 성공한 비트맵의 지점을 지정하며 신규 예약의 출발점으로 사용됩니다. 이로 인해 최초 적합 알고리즘이 조금 더 빨라지긴 하지만 여전히 더 정교한 기술을 대체할 수는 없습니다.
연속 메모리가 있는 시스템에는 둘 이상의 bootmem 할당자가 필요할 수 있습니다. 이는 일반적으로 노드당 하나의 bootmem 할당자를 등록하는 NUMA 시스템의 경우이지만, 예를 들어 물리적 주소 공간이 구멍으로 산재되어 있는 시스템의 각 연속 메모리 영역에 대해 하나의 bootmem 할당자를 등록하는 것도 가능합니다. 새로운 부팅 할당자는 init_bootmem_core에 등록되고, 등록된 모든 할당자의 목록은 전역 변수 bdata_list로 시작됩니다.
UMA 시스템에서 필요한 단일 bootmem_t 인스턴스는 contig_bootmem_data라고 합니다 . 이는 bdata 요소 를 통해 contig_page_data 와 연결됩니다 . mm/page_alloc.c static bootmem_data_t contig_bootmem_data; struct pglist_data contig_page_data = { .bdata = &contig_bootmem_data };
Initialization¶
bootmem 할당자를 초기화하는 것은 해당 머신의 메모리 레이아웃에 추가로 의존하는 아키텍처별 프로세스입니다. 위에서 설명한 것처럼 IA-32는 setup_memory를 사용합니다.
bootmem 할당자를 초기화하기 위해 setup_bootmem_allocator를 호출하는 반면, AMD64는 contig_initmem_init를 사용합니다.
그림 3-20의 코드 흐름 다이어그램은 IA-32 시스템에서 bootmem 할당자의 초기화와 관련된 개별 단계를 보여 주며, AMD64에 대한 해당 다이어그램은 그림 3-21에 표시되어 있습니다.
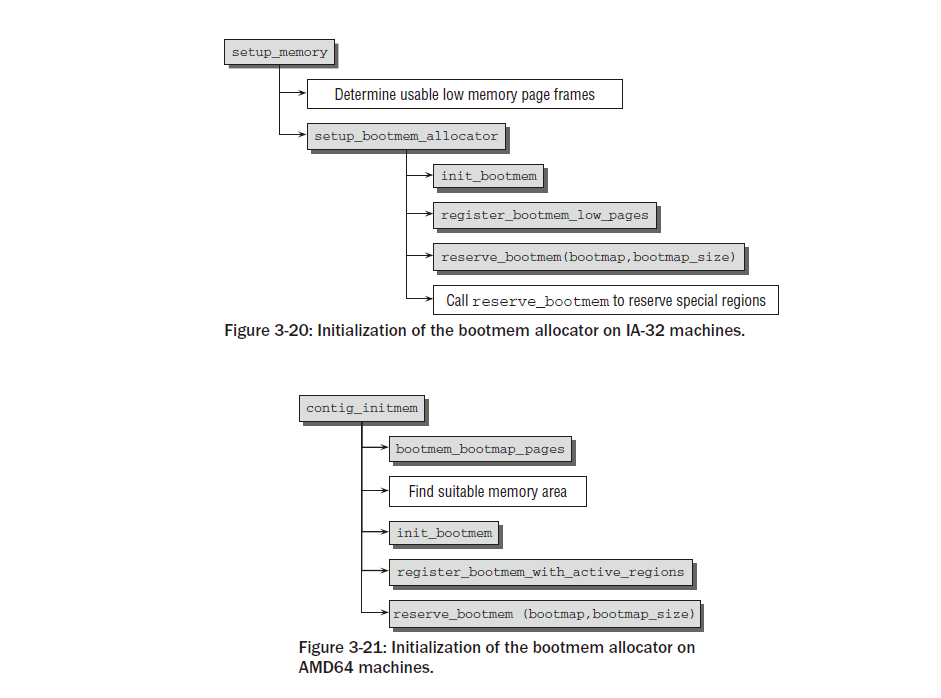
Initialization for IA-32¶
setup_memory는 감지된 메모리 영역을 분석하여 낮은 메모리 영역에서 최대 페이지 프레임 수를 찾습니다. 높은 메모리는 처리하기가 너무 복잡하기 때문에 bootmem 할당자에는 쓸모가 없습니다. 전역 변수 max_low_pfn은 매핑 가능한 가장 높은 페이지 번호를 보유합니다. 커널은 부팅 로그에서 발견된 메모리 양을 보고합니다. wolfgang@meitner> dmesg … 0MB HIGHMEM available. 511MB LOWMEM available. …
이 정보를 기반으로 setup_bootmem_allocator는 bootmem 할당자를 초기화하는 데 필요한 모든 단계를 시작하는 역할을 담당합니다. 먼저 init_bootmem_core 의 프런트 엔드인 일반 함수 init_bootmem을 호출합니다. init_bootmem_core 의 목적은 bootmem 할당자의 첫 번째 초기화 단계를 수행하는 것입니다. 이전에 감지된 메모리 부족 페이지 프레임 범위는 담당 bootmem_data_t 인스턴스(이 경우 contig_bootmem_data )에 입력됩니다 . 모든 페이지는 처음에 contig_bootmemdata->node_bootmem_map 비트맵에서 사용된 것으로 표시됩니다 . init_bootmem_core 는 아키텍처 독립적인 함수이기 때문에 어떤 페이지를 사용할 수 있고 어떤 페이지를 사용할 수 없는지 아직 알 수 없습니다.
일부는 아키텍처상의 이유로 특별한 처리가 필요합니다(예: IA-32 시스템의 0페이지). 예를 들어 일부는 커널 이미지에서 이미 사용되었습니다. 실제로 사용할 수 있는 페이지는 아키텍처 종속 코드로 명시적으로 표시되어야 합니다.
이 표시는 두 가지 아키텍처별 함수로 수행됩니다. Register_bootmem_low_pages는 페이지가 사용되지 않은 것으로 표시되도록 비트맵의 해당 비트를 0으로 설정하여 잠재적으로 사용 가능한 모든 메모리 페이지를 해제합니다. IA-32 시스템은 초기화 중 초기 시점에 사용 가능한 모든 메모리 영역 목록(e820 맵)을 커널에 제공하는 BIOS에 의해 이 작업에서 지원됩니다. bootmem 할당자는 예약 비트맵을 관리하기 위해 일부 메모리 페이지를 필요로 하므로, Reserve_bootmem을 호출하여 먼저 이를 예약해야 합니다.
그러나 이미 사용 중인 지역이 더 많으므로 이에 따라 표시해야 합니다. 이를 위해 Reserve_bootmem은 이벤트 이후에 해당 페이지를 등록합니다. 등록해야 하는 정확한 영역 수는 커널 구성에 따라 크게 달라집니다. 예를 들어, 이 페이지는 일부 시스템 관련 기능이 제대로 작동하는 데 필요한 많은 시스템의 특수 BIOS 페이지이기 때문에 0번째 페이지를 예약해야 합니다. 예를 들어 다른 Reserve_bootmem 호출은 ACPI 데이터 또는 SMP 부팅 시간 구성을 위해 구성 종속 메모리 영역을 예약합니 다.
Initialization for AMD64¶
bootmem 초기화의 기술적 세부 사항은 AMD64에서 다르지만 일반적인 구조는 IA-32의 경우와 유사합니다. 이번에는 contig_initmem이 책임 디스패처입니다. 우선, bootmem_bootmap_bitmap은 bootmem 비트맵에 필요한 페이지 수를 계산합니다. e820 맵의 BIOS에서 제공하는 정보를 사용하면 IA 32에서와 같이 적절한 RAM 페이지로 채워지는 적절한 크기의 연속 메모리 영역을 찾을 수 있습니다. 그런 다음 이 정보는 init_bootmem을 사용하여 아키텍처 독립적인 bootmem 데이터 구조에 채워집니다 . 이전과 마찬가지로 함수는 모든 페이지를 예약된 것으로 표시하므로 이제 사용 가능한 페이지를 선택해야 합니다. free_bootmem_with_active_regions는 e820 맵의 정보를 다시 한 번 사용하여 BIOS에서 사용 가능한 것으로 보고 된 모든 메모리 영역을 해제할 수 있습니다. 마지막으로, Reserve_bootmem을 한 번만 호출하면 bootmem 할당 비트맵에 필요한 공간을 등록하는 데 충분합니다. IA-32와 달리 메모리의 마법적인 위치에 대한 레거시 정보를 위한 공간을 예약할 필요가 없습니다.
Interface to the Kernel Allocating Memory ———————— 커널은 초기화 중에 메모리를 예약하기 위한 다양한 기능을 제공합니다. UMA 시스템에서는 다음 기능을 사용할 수 있습니다.
alloc_bootmem(size) 및 alloc_bootmem_pages(size)는 크기가 다음과 같은 메모리를 예약합니다. ZONE_NORMAL 의 크기 로 표현됩니다 . 메모리가 L1 캐시의 이상적인 위치나 페이지 경계에서 시작되도록 데이터가 정렬됩니다.
alloc_bootmem_pages 라는 이름은 필요한 크기가 페이지 단위로 지정됨을 암시 하지만 _pages는 데이터 정렬 만을 나타냅니다 .
alloc_bootmem_low 및 alloc_bootmem_low_pages는 위 함수와 동일한 방식으로 작동하지만 DMA 작업에 적합한 ZONE_DMA 영역을 소스로 사용합니다. 따라서 이 기능은 DMA 메모리가 필요할 때만 사용해야 합니다.
기본적으로 동일한 API가 NUMA 시스템에 적용되지만 접미사 _node가 함수 이름에 추가됩니다. UMA 기능과 비교하여 메모리 예약에 사용할 노드를 지정하려면 추가 매개변수가 필요합니다. 이러한 함수는 모두 실제 작업을 __alloc_bootmem_nopanic에 위임하는 __alloc_bootmem 의 프런트 엔드입니다 . 둘 이상의 bootmem 할당자를 등록할 수 있으므로(모두 전역 목록에 보관된다는 점을 기억하세요) __alloc_bootmem_core는 하나가 성공할 때까지 모든 할당자를 반복합니다. NUMA 시스템에서는 __alloc_bootmem_node가 API 기능을 구현하는 데 사용됩니다. 먼저 작업이 __alloc_bootmem_core 로 전달되어 노드의 특정 bootmem 할당자에 대한 할당을 시도합니다. 이것이 실패하면 함수는 모든 노드를 시도하는 __alloc_bootmem 으로 대체됩니다 .
mm/bootmem.c void * __init __alloc_bootmem(unsigned long size, unsigned long align, unsigned long goal)
__alloc_bootmem에는 요청을 설명하는 세 가지 매개변수가 필요합니다. size 는 원하는 메모리 영역의 크기이고, align은 데이터 정렬을 나타내며, goal은 적합한 여유 영역 검색이 시작될 시작 주소를 지정합니다. 프런트엔드는 다음과 같은 기능을 사용합니다.
<bootmem.h> #define alloc_bootmem(x) __alloc_bootmem((x), SMP_CACHE_BYTES, __pa(MAX_DMA_ADDRESS)) #define alloc_bootmem_low(x) __alloc_bootmem((x), SMP_CACHE_BYTES, 0) #define alloc_bootmem_pages(x) __alloc_bootmem((x), PAGE_SIZE, __pa(MAX_DMA_ADDRESS)) #define alloc_bootmem_low_pages(x) __alloc_bootmem((x), PAGE_SIZE, 0)
- 원하는 할당 크기 (x) 는 변경되지 않고 __alloc_bootmem 으로 전달되지만 메모리 정렬에는 두 가지 옵션이 있습니다.
- SMP_CACHE_BYTES는 대부분의 아키텍처에서 데이터가 L1 캐시에 이상적으로 배치되도록 정렬합니다(물론 상수라는 이름에도 불구하고). , 단일 프로세서 시스템에서도 정의됨) PAGE_SIZE는 페이지 경계에 데이터를 정렬합니다. 후자 정렬은 하나 이상의 전체 페이지를 할당하는 데 이상적이지만 전자는 페이지의 일부를 할당할 때 더 나은 결과를 생성합니다.
시작 주소를 통해 낮은 메모리와 일반 메모리를 구분합니다. DMA 적합 메모리 검색은 주소 0에서 시작되는 반면 RAM이 있는 일반 메모리에 대한 요청은 MAX_DMA_ADDRESS 부터 위쪽 으로 처리됩니다 (__pa는 메모리 주소를 페이지 번호로 변환합니다). __alloc_bootmem_core 는 상대적으로 광범위한 기능(부팅 중에 효율성이 필요하지 않음)이지만 주요 작업은 이미 설명한 첫 번째 적합 알고리즘을 구현하는 것이기 때문에 자세히 설명하지 않겠습니다. 그러나 전체 메모리 페이지뿐만 아니라 그보다 작은 부분도 예약할 수 있도록 할당자가 향상되었습니다. 이 함수는 다음(개요) 작업을 수행합니다. 1. 목표 부터 시작하여 할당 요청을 만족시키기 위해 여유 영역을 찾기 위해 페이지 비트맵을 스캔합니다.
2. 발견된 페이지가 bootmem_data-> last_pos 에 보관된 마지막 할당 페이지 바로 뒤에 오는 경우 커널은 bootmem_data->last_offset을 참조하여 필요한 메모리(데이터 정렬에 필요한 공간 포함)를 마지막 페이지에 할당할 수 있는지 확인합니다. 아니면 적어도 거기에서 시작할 수 있습니다.
3. 블록 비트맵에서 새로 할당된 페이지의 비트는 1로 설정됩니다. 할당된 마지막 페이지의 번호도 bootmem_data >last_pos에 저장됩니다. 페이지가 완전히 할당되지 않은 경우 bootmem_data->last_offset에 적절한 오프셋이 보관됩니다. 그렇지 않으면 이 값은 0으로 설정됩니다.
Releasing Memory¶
커널은 메모리를 확보하기 위해 free_bootmem 함수를 제공합니다. 시작 주소와 해제할 영역의 크기라는 두 가지 매개변수가 필요합니다. NUMA 시스템에서 해당 기능의 이름은 놀랍게도 free_bootmem_node입니다. 적절한 노드를 정의하려면 추가 매개변수가 필요합니다.
<bootmem.h> void free_bootmem(unsigned long addr, unsigned long size); void free_bootmem_node(pg_data_t *pgdat, unsigned long addr, unsigned long size);
두 버전 모두 작업을 __free_bootmem_core에 위임합니다. bootmem 할당자는 페이지 분할에 대한 정보를 보관하지 않으므로 전체 페이지만 해제할 수 있습니다. 커널은 __free_bootmem_core를 사용하여 먼저 해제할 영역에 콘텐츠가 완전히 보관된 페이지를 계산합니다 . 이 영역의 일부 내용만 포함된 페이지는 무시됩니다. 페이지 비트맵의 해당 항목은 0으로 설정되어 페이지 해제를 완료합니다. 이 절차는 연속적인 요청에서 페이지 내용의 일부가 반환되는 경우 페이지가 해제되지 않을 위험을 숨깁니다. 페이지의 첫 번째 절반과 나중에 같은 페이지의 두 번째 절반이 해제되면 할당자는 전체 페이지가 더 이상 사용되지 않으므로 해제될 수 있다는 것을 알 수 없습니다. 사실은 아니지만 페이지는 단순히 ‘사용 중’으로 남아 있습니다. 그럼에도 불구하고 free_bootmem은 거의 사용되지 않으므로 이는 큰 문제가 되지 않습니다 . 시스템 초기화 중에 할당된 대부분의 메모리 영역은 커널 런타임 전체에 걸쳐 필요한 기본 데이터 구조를 위해 고안되었으므로 결코 포기되지 않습니다.
Disabling the Bootmem Allocator¶
버디 시스템 할당자가 메모리 관리를 담당할 수 있도록 시스템 초기화가 진행된 후에는 bootmem 할당자를 비활성화해야 합니다. 결국 두 할당자가 동시에 메모리를 관리할 수는 없습니다. 비활성화는 UMA 시스템의 free_all_bootmem 과 NUMA 시스템의 free_all_bootmem_node를 통해 수행됩니다 . 둘 다 버디 시스템이 설정된 후 아키텍처별 초기화 코드에 의해 호출되어야 합니다. bootmem 할당자의 페이지 비트맵이 먼저 스캔되고 사용되지 않은 모든 페이지가 해제됩니다. 버디 시스템에 대한 인터페이스는 해제된 각 페이지에 대해 호출되는 __free_pages_bootmem 함수입니다. 이 함수는 내부적으로 표준 함수 __free_page에 의존합니다. 페이지를 버디 시스템의 데이터 구조에 통합하여 무료 페이지로 관리하고 할당할 수 있습니다. 페이지 비트맵이 완전히 스캔되면 해당 비트맵이 차지하는 메모리 공간도 제거되어야 합니다.이후에는 버디 시스템만 메모리 할당에 사용할 수 있습니다.
Releasing Initialization Data¶
많은 커널 코드 청크와 데이터 테이블은 시스템 초기화 단계에서만 필요합니다. 예를 들어, 영구적으로 연결된 드라이버의 경우 커널 메모리에 데이터 구조 초기화 루틴을 유지할 필요가 없습니다. 일단 구조가 설정되면 더 이상 필요하지 않습니다. 마찬가지로, 관련 장치가 식별되면 운전자가 장치를 감지하는 데 필요한 하드웨어 데이터베이스는 더 이상 필요하지 않습니다.
커널은 초기화 함수와 데이터에 레이블을 지정하기 위해 두 가지 ‘속성’ (__init 및 __initcall) 을 제공합니다. 이는 함수 또는 데이터 선언 앞에 배치되어야 합니다. 예를 들어, (가상의 …) 네트워크 카드 HyperHopper2000의 프로빙 루틴은 시스템이 초기화되면 더 이상 사용되지 않습니다.
int __init hyper_hopper_probe(struct net_device *dev)
__init 속성은 함수 선언의 반환 유형과 이름 사이에 삽입됩니다 . 마찬가지로 데이터 섹션에는 초기화 데이터로 레이블이 지정될 수 있습니다. 예를 들어 가상 네트워크 카드 드라이버에는 시스템 초기화 단계에서만 몇 가지 문자열이 필요합니다. 그 이후에는 문자열을 삭제할 수 있습니다. static char search_msg[] __initdata = “%s: Desperately looking for HyperHopper at address %x…”; static char stilllooking_msg[] __initdata = “still searching…”; static char found_msg[] __initdata = “found.n”; static char notfound_msg[] __initdata = “not found (reason = %d)n”; static char couldnot_msg[] __initdata = “%s: HyperHopper not foundn”;
__init 및 __initdata는 일반적인 C 수단을 사용하여 구현할 수 없으므로 커널은 다시 한 번 특수 GNU C 컴파일러 문에 의존해야 합니다. 구현 뒤에 숨은 일반적인 아이디어 초기화 기능은 커널 이미지의 특정 부분에 데이터를 완전히 보관하는 것입니다. 부팅이 완료되면 메모리에서 제거됩니다. 다음 매크로는 이것으로 정의됩니다염두에 :
<init.h> #define __init __attribute__ ((__section__ (“.init.text”))) __cold #define __initdata __attribute__ ((__section__ (“.init.data”)))
__attribute__ 는 속성 사용을 허용하는 특수 GNU C 키워드입니다. __section__ 속성은 다음 과 같습니다.후속 데이터나 함수를 각각의 .init.data 에 쓰도록 컴파일러에 지시하는 데 사용됩니다 . 바이너리 파일의 .init.text 섹션(ELF 파일 구조에 익숙하지 않은 사용자는 참조)부록 E). 접두사 __cold는 또한 함수로 이어지는 경로가 다음과 같이 될 것임을 컴파일러에 지시합니다. 즉, 함수가 자주 호출되지 않을 가능성이 높습니다. 이는 일반적으로 초기화의 경우입니다. 기능. readelf 도구를 사용하여 커널 이미지의 개별 섹션을 표시할 수 있습니다 .
wolfgang@meitner> readelf — sections vmlinux There are 53 section headers, starting at offset 0x2c304c8: Section Headers: [Nr] Name Type Address Offset Size EntSize Flags Link Info Align [ 0] NULL 0000000000000000 00000000 0000000000000000 0000000000000000 0 0 0 [ 1] .text PROGBITS ffffffff80200000 00200000 000000000021fc6f 0000000000000000 AX 0 0 4096 [ 2] __ex_table PROGBITS ffffffff8041fc70 0041fc70 0000000000003e50 0000000000000000 A 0 0 8 [ 3] .notes NOTE ffffffff80423ac0 00423ac0 0000000000000024 0000000000000000 AX 0 0 4 … [28] .init.text PROGBITS ffffffff8067b000 0087b000 000000000002026e 0000000000000000 AX 0 0 1 [29] .init.data PROGBITS ffffffff8069b270 0089b270 000000000000c02e 0000000000000000 WA 0 0 16 …
메모리에서 초기화 데이터를 해제하기 위해 커널이 초기화 데이터의 특성을 알 필요는 없습니다. 데이터 — 어떤 데이터와 기능이 메모리에 저장되어 있으며 어떤 목적으로 사용되는지는 전혀 관련이 없습니다. 관련된 유일한 정보는 데이터와 기능이 시작되는 메모리의 주소입니다. 그리고 끝. 이 정보는 컴파일 시 사용할 수 없으므로 커널이 링크될 때 패치됩니다. 나는 이 장의 다른 부분에서 이미 이 기술을 언급했습니다. 이를 지원하기 위해 커널은 다음을 정의합니다.변수 쌍 __init_begin 및 __init_end, 이름에서 의미를 알 수 있습니다. free_initmem은 초기화 목적으로 정의된 메모리 영역을 해제하고 페이지를 버디 시스템에 반환하는 일을 담당합니다. 이 함수는 부팅 프로세스가 끝나면 즉시 호출됩니다. init가 시스템의 첫 번째 프로세스를 시작 하기 전에 . 부팅 로그에는 얼마나 많은 양을 나타내는 메시지가 포함되어 있습니다.메모리가 해제되었습니다.
wolfgang@meitner> dmesg … Freeing unused kernel memory: 308k freed … 오늘날의 일반적인 주 메모리 크기와 비교할 때 약 300KiB의 여유 공간은 크지는 않지만 상당한 기여를 합니다. 초기화 데이터를 제거하는 것은 특히 본질적으로 메모리가 거의 없는 휴대용 시스템이나 내장형 시스템에서 중요합니다.
3.5 Management of Physical Memory¶
커널 초기화가 완료되면 버디 시스템이 메모리 관리 책임을 맡습니다. 버디 시스템은 거의 40년 동안 우리와 함께해온 상대적으로 단순하지만 그럼에도 불구하고 놀랍도록 강력한 알고리즘을 기반으로 합니다. 이는 좋은 메모리 할당자의 두 가지 주요 특성인 속도와 효율성을 결합합니다.
3.5.1 Structure of the Buddy System¶
구조체 페이지 의 인스턴스는 시스템에 있는 메모리의 각 물리적 페이지(페이지 프레임)에 대해 사용할 수 있습니다. 각 메모리 영역은 친구 데이터를 관리하기 위한 중앙 배열을 보유하는 구조체 영역 의 인스턴스와 연결됩니다 . <mmzone.h> struct zone { … /* * free areas of different sizes */ struct free_area free_area[MAX_ORDER]; … };
free_area 는 아직 만나보지 못한 보조 데이터 구조입니다. 이는 다음과 같이 정의됩니다:
<mmzone.h> struct free_area { struct list_head free_list[MIGRATE_TYPES]; unsigned long nr_free; };
nr_free는 현재 영역의 사용 가능한 페이지 블록 수를 지정합니다(0번째 영역의 경우 페이지 단위로 계산되고, 순서 1의 경우 두 페이지 쌍으로, 순서 2의 경우 네 페이지 세트로 계산됩니다). free_list는 페이지 목록을 연결하는 데 사용됩니다. 1장에서 설명한 것처럼 페이지 목록에는 동일한 크기의 연속적인 메모리 영역이 포함되어 있습니다. 정의에서는 두 개 이상의 페이지 목록을 제공하지만 이 사실을 잠시 무시하고 아래에 다른 목록이 있는 이유를 다시 설명합니다.
순서 는 버디 시스템에서 매우 중요한 용어입니다. 메모리를 할당할 수 있는 수량화된 단위를 설명합니다. 메모리 블록의 크기는 2order이며, order 는 0에서 MAX_ORDER까지 확장될 수 있습니다.
<mmzone.h> #ifndef CONFIG_FORCE_MAX_ZONEORDER #define MAX_ORDER 11 #else #define MAX_ORDER CONFIG_FORCE_MAX_ZONEORDER #endif #define MAX_ORDER_NR_PAGES (1 << (MAX_ORDER - 1))
이 상수의 일반적인 값은 11이며, 이는 단일 할당에서 요청할 수 있는 최대 페이지 수는 211 = 2,048임을 의미합니다. 그러나 아키텍처에서 FORCE_MAX_ZONEORDER 구성 옵션을 설정한 경우 이 값을 수동으로 변경할 수 있습니다. -특정 코드. 예를 들어, IA-64 시스템의 거대한 주소 공간은 MAX_ORDER = 18 로 작업할 수 있는 반면 ARM 또는 v850 시스템은 8 또는 9와 같은 더 작은 값을 사용합니다. 그러나 이는 반드시 시스템에서 지원하는 메모리가 적기 때문에 발생하는 것은 아닙니다. 이지만 메모리 정렬 요구 사항 때문일 수도 있습니다. 또는 V850 아키텍처의 Kconfig 구성 파일에 따르면 다음과 같습니다.
arch/v850/Kconfig # The crappy-ass zone allocator requires that the start of allocatable # memory be aligned to the largest possible allocation. config FORCE_MAX_ZONEORDER int default 8 if V850E2_SIM85E2C || V850E2_FPGA85E2C
free_area[] 배열 의 개별 요소 인덱스 도 순서 매개변수로 해석되며 공유 목록의 연속 영역에 존재하는 페이지 수를 지정합니다. 0번째 배열 요소는 한 페이지(20 = 1)로 구성된 섹션을 나열하고, 첫 번째 배열 요소는 페이지 쌍을 나열하고(21 = 2), 세 번째는 4페이지 세트를 관리하는 식입니다. 페이지 영역은 어떻게 연결되어 있나요? 블록 의 첫 번째 페이지에 있는 목록 요소 는 블록을 목록에 유지하는 데 사용됩니다. 결과적으로 물리적으로 인접한 그룹 페이지에 새로운 데이터 구조를 도입할 필요가 없습니다. 그렇지 않으면 페이지가 블록에 포함되지 않습니다.
그림 3-22에서는 상황을 그래픽으로 보여줍니다.
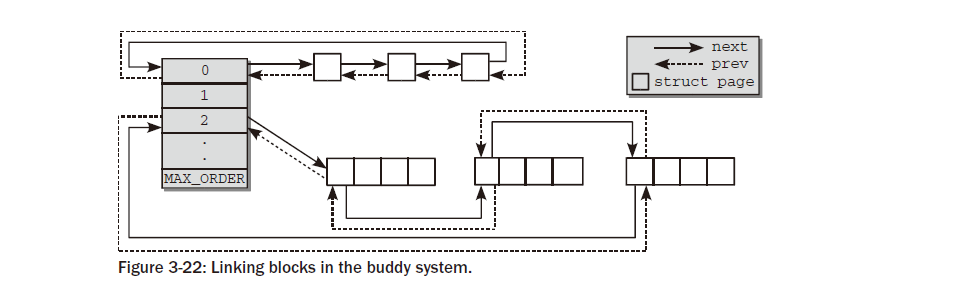
친구는 서로 연결될 필요가 없습니다 . 할당 중에 블록이 절반 크기의 두 블록으로 분할되면 커널은 사용되지 않은 절반을 다음 더 작은 블록 목록에 자동으로 추가합니다. 메모리가 해제된 후 향후 어느 시점에 두 블록이 모두 사용되지 않으면 해당 주소를 참조하여 자동으로 친구인지 여부를 확인할 수 있습니다. 이러한 최소한의 관리 노력은 버디 시스템의 주요 장점입니다.
버디 시스템 기반의 메모리 관리는 노드의 단일 메모리 영역에 집중되어 있으며,예를 들어 DMA 또는 대용량 메모리 영역이 있습니다. 그러나 모든 존과 노드의 버디 시스템은할당 대체 목록을 통해 연결됩니다. 그림 3-23은 이 관계를 보여줍니다. 선호하는 영역이나 노드에서 메모리 요청을 충족할 수 없는 경우 먼저 해당 영역의 다른 영역을동일한 노드를 선택하고 요청을 이행하기 위해 다른 노드를 선택합니다.
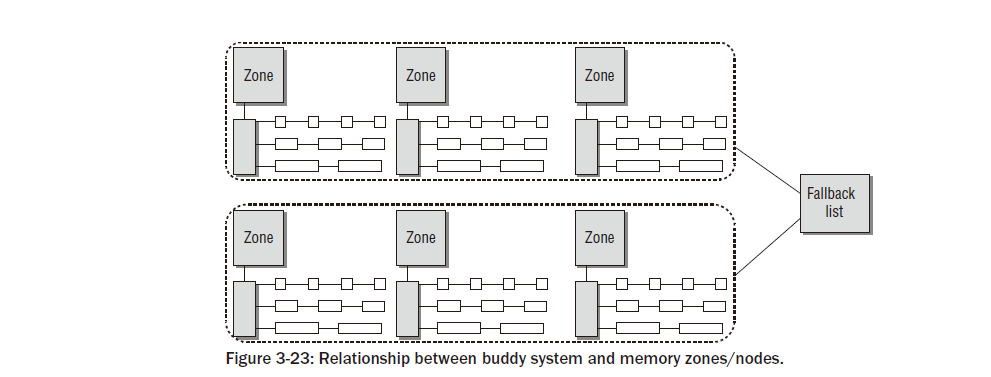
마지막으로, 버디 시스템의 현재 상태에 대한 정보는 다음에서 확인할 수 있습니다.
wolfgang@meitner> cat /proc/buddyinfo Node 0, zone DMA 3 5 7 4 6 3 3 3 1 1 1 Node 0, zone DMA32 130 546 695 271 107 38 2 2 1 4 479 Node 0, zone Normal 23 6 6 8 1 4 3 0 0 0 0
구역별로 할당 순서별 무료 입장 횟수가 인쇄되며, 왼쪽부터 순서가 늘어납니다.오른쪽으로. 위에 표시된 정보는 4GiB RAM을 갖춘 AMD64 시스템에서 가져온 것입니다.
3.5.2 Avoiding Fragmentation¶
소개에 주어진 단순화된 설명에서는 하나의 이중 연결 리스트가 모든 것을 만족시키기에 충분했습니다. 친구 시스템의 필요성. 이것은 실제로 커널 2.6.23까지의 상황이었습니다. 그러나 커널 2.6.24를 개발하는 동안 버디 시스템에서는 패치 통합에 대한 논란이 있었습니다. 비정상적으로 오랜 시간 동안 커널 개발자들 사이에 있었습니다. 친구 시스템 중 하나이기 때문에커널의 가장 존경받는 구성 요소이므로 변경 사항을 가볍게 받아들이지 않습니다.
Grouping Pages byMobility¶
버디 시스템의 기본 원리는 서론에서 논의되었으며, 그 방식은 다음과 같다.실제로 지난 몇 년 동안 매우 잘 작동했습니다. 그러나 한 가지 문제가 발생했습니다. Linux 메모리 관리의 오랜 문제: 시스템이 오랫동안 실행된 후시간이 길어질수록 실제 메모리는 조각화되는 경향이 있습니다. 상황은 그림 3-24에 묘사되어 있습니다.

메모리가 60페이지로 구성되어 있다고 가정합니다. 이는 분명히 다음 슈퍼컴퓨터의 핵심 구성 요소는 아니지만 예를 들기에는 충분합니다. 사용 가능한 페이지는 왼쪽의 주소 공간에 분산되어 있습니다. 실제 메모리의 약 25%가 아직 할당되지 않았지만 가장 큰 연속 여유 공간은 단일 페이지에 불과합니다. 이는 사용자 공간 응용 프로그램에는 문제가 되지 않습니다. 메모리가 페이지 테이블에 매핑되기 때문에 사용 가능한 페이지가 실제 메모리에 어떻게 배포되는지에 관계없이 항상 연속적으로 나타납니다. 오른쪽은 사용된 페이지와 사용 가능한 페이지 수가 동일하지만 모든 사용 가능한 페이지가 연속 영역에 있는 상황을 보여줍니다. 그러나 조각화는 커널에 문제가 됩니다. (대부분의) RAM은 주소 공간의 커널 부분에 ID 매핑되므로 이 시나리오에서는 단일 페이지보다 큰 영역을 매핑할 수 없습니다. 많은 커널 할당은 작지만 단일 페이지 이상을 할당해야 하는 경우도 있습니다. 분명히 모든 예약된 페이지와 사용 가능한 페이지가 연속적인 영역에 있는 오른쪽의 상황이 더 바람직할 것입니다. 흥미롭게도 조각화 문제는 대부분의 메모리가 아직 할당되지 않은 경우 이미 발생할 수 있습니다. 그림 3-25의 상황을 생각해 보십시오. 4페이지만 예약되어 있지만 버디 시스템은 2의 거듭제곱인 할당 범위에서만 작동할 수 있으므로 할당할 수 있는 가장 큰 연속 영역은 8페이지입니다.

메모리 조각화는 커널에만 관련된다고 언급했지만 이는 부분적으로만 사실입니다. 대부분의 최신 CPU는 일반 페이지보다 페이지 크기가 훨씬 큰 거대한 페이지에 대한 작업 가능성을 제공합니다. 이는 메모리 집약적인 애플리케이션에 이점이 있습니다. 더 큰 페이지가 사용되면 변환 참조 버퍼는 더 적은 수의 항목을 처리해야
하며 TLB 캐시 누락 가능성이 줄어듭니다.
그러나 거대한 페이지를 할당하려면 물리적 RAM의 무료 연속 영역이 필요합니다! 실제로 물리적 메모리의 조각화는 유난히 오랜 기간 동안 Linux의 약점 중 하나였습니다. 많은 접근 방식이 제안되었지만 다른 접근 방식에 너무 큰 영향을 주지 않으면서 Linux가 직면해야 하는 수많은 작업 부하의 까다로운 요구 사항을 충족할 수 있는 방법은 없습니다. 커널 2.6.24를 개발하는 동안 조각화를 방지하는 수단이 마침내 커널에 도입되었습니다. 그들의 전략을 논의하기 전에 한 가지 사항을 명확히 해야 합니다. 조각화는 파일 시스템에서도 알려져 있으며 이 영역에서 문제는 일반적으로 조각 모음 도구로 해결됩니다. 조각 모음 도구는 파일 시스템을 분석하고 더 큰 연속 영역이 발생하도록 할당된 블록을 재배열합니다. 이 접근 방식은 원칙적으로 RAM에도 가능하지만 많은 물리적 페이지가 있다는 사실로 인해 복잡해집니다.
임의의 위치로 이동할 수 없습니다. 따라서 커널의 접근 방식은 조각화 방지입니다. 처음부터 조각화를 방지하도록 노력하십시오.
조각화 방지는 어떻게 작동하나요? 접근 방식을 이해하려면 커널이 세 가지 유형의 예약 페이지를 구별한다는 점을 알아야 합니다.
동할 수 없는 페이지는 메모리에서 고정된 위치를 가지며 다른 곳으로 이동할 수 없습니다. 최대 코어 커널의 할당이 이 범주에 속합니다. 회수 가능 페이지는 직접 이동할 수 없지만 일부 소스에서 삭제하고 내용을 다시 생성할 수 있습니다. 예를 들어, 파일에 서 매핑된 데이터가 이 범주에 속합니다. 회수 가능한 페이지는 액세스 빈도에 따라 kswapd 데몬 에 의해 주기적으로 해제됩니다 . 이는 페이지 회수에 대해 자세히 설명하는 18장에서 자체적으로 자세히 논의할 가치가 있는 복잡한 프로세스입니다. 그동안 RAM을 너무 많이 사용하기 시작하면 회수 가능한 페이지를 커널이 제거할 것이라는 점만 알아도 충분합니다. 메모리가 급격히 부족할 때, 즉 할당이 실패한 경우 페이지 회수를 시작하는 것도 가능합니다. 커널이 필요하다고 판단하는 경우 아래에서 추가 내용을 볼 수 있습니다.
이동 가능한 페이지는 원하는 대로 이동할 수 있습니다. 사용자 공간 애플리케이션에 속하는 페이지가 이 범주에 속합니다.
페이지 테이블을 통해 매핑됩니다. 새 위치에 복사되면 페이지 테이블 항목이 그에 따라 업데이트될 수 있으며 애플리케이션은 아무 것도 알아차리지 못합니다.
페이지는 세 가지 범주 중 어느 범주에 속하는지에 따라 특정 이동성을 갖습니다. 커널에서 사용하는 조각화 방지 기술은 이동성이 동일한 페이지를 그룹화하는 아이디어를 기반으로 합니다. 이 접근 방식이 조각화를 줄이는 데 도움이 되는 이유는 무엇입니까? 그림 3-25에서 다른 곳으로 이동할 수 없는 페이지는 거의 완전히 비어 있는 RAM 영역에서 지속적인 할당을 방해할 수 있다는 점을 상기해 보세요. 이동성에 따라 페이지를 다른 목록에 배포하면 이러한 상황이 방지됩니다. 예를 들어, 이동 불가능한 페이지는 이동 가능한 페이지 블록의 중간에 위치할 수 없으며 블록의 더 큰 부분이 사용되는 것을 효과적으로 방지할 수 있습니다. 그림 3-25의 사용 가능한 페이지 대부분은 회수 가능 범주에 속하고 예약된 페이지는 이동할 수 없다고 상상해 보십시오. 그러나 페이지가 두 개의 서로 다른 목록에 수집된 경우 상황은 그림 3-26과 같을 수 있습니다. 이동할 수 없는 페이지의 경우 크고 연속적인 여유 공간을 찾는 것은 여전히 어렵지만 회수 가능한 페이지의 경우 훨씬 쉽습니다.
그러나 메모리는 처음부터 서로 다른 이동성 영역으로 분할되지는 않습니다. 런타임 시 채워집니다. 커널의 두 번째 접근 방식은 메모리를 이동 가능한 할당과 그렇지 않은 할당을 위한 영역으로 분할 하며 이것이 어떻게 작동하는지 아래에서 설명하겠습니다. 그러나 이러한 분할은 여기에 설명된 접근 방식에 필수적인 것은 아닙니다.
Data Structures¶
커널에서 사용하는 조각화 방지 기술은 매우 효과적이지만 버디 할당자의 코드 및 데이터 구조에는 놀랍게도 거의 영향을 미치지 않습니다. 커널은 다양한 마이그레이션 유형을 나타내는 몇 가지 매크로를 정의합니다.
<mmzone.h> #define MIGRATE_UNMOVABLE 0 #define MIGRATE_RECLAIMABLE 1 #define MIGRATE_MOVABLE 2 #define MIGRATE_RESERVE 3 #define MIGRATE_ISOLATE 4 /* can’t allocate from here */ #define MIGRATE_TYPES 5
MIGRATE_UNMOVABLE, MIGRATE_RECLAIMABLE 및 MIGRATE_MOVABLE 유형이 이미 도입되었습니다. MIGRATE_RESERVE는 이동성 관련 목록에서 할당 요청을 이행할 수 없는 경우 비상 메모리 예약을 제공합니다(이는 setup_zone_ migration_reserve 를 사용하여 메모리 하위 시스템을 초기화하는 동안 채워지지만 이에 대해서는 자세히 설명하지 않겠습니다). MIGRATE_ISOLATE 는 NUMA 노드에서 물리적 페이지를 이동하는 데 필요한 특수 가상 영역입니다. 대규모 시스템에서는 물리적 페이지를 가장 많이 사용하는 CPU에 더 가깝게 가져오는 것이 유리할 수 있습니다. 마지막으로 MIGRATE_TYPES 도 영역이 아니며 단지 마이그레이션 유형의 수를 나타냅니다. 버디 시스템 데이터 구조의 핵심 조정은 사용 가능한 목록이 MIGRATE_TYPE 수의 목록으로 분할된다는 것입니다.
<mmzone.h> struct free_area { struct list_head free_list[MIGRATE_TYPES]; unsigned long nr_free; };
nr_free는 모든 목록 의 사용 가능한 페이지 수를 계산 하지만 각 마이그레이션 유형에 대해 특정 사용 가능한 목록이 제공됩니다. for_each_ migrationtype_order(order, type) 매크로를 사용하여 모든 할당 순서의 마이그레이션 유형을 반복할 수 있습니다. 커널이 특정 마이그레이션 유형에 대한 할당 요청을 이행할 수 없으면 어떻게 됩니까? 유사한 문제는 이전에도 이미 발생했습니다. 즉, 특정 NUMA 영역에서 할당을 이행할 수 없는 경우 어떤 일이 발생하는지 고려할 때 발생했습니다. 커널은 원하는 목록에서 요청을 이행할 수 없는 경우 다음에 사용해야 하는 마이그레이션 유형을 규제하는 대체 목록을 제공하여 이 경우와 유사하게 진행합니다. mm/page_alloc.c /* * This array describes the order lists are fallen back to when * the free lists for the desirable migrate type are depleted / static int fallbacks[MIGRATE_TYPES][MIGRATE_TYPES-1] = { [MIGRATE_UNMOVABLE] = { MIGRATE_RECLAIMABLE, MIGRATE_MOVABLE, MIGRATE_RESERVE }, [MIGRATE_RECLAIMABLE] = { MIGRATE_UNMOVABLE, MIGRATE_MOVABLE, MIGRATE_RESERVE }, [MIGRATE_MOVABLE] = { MIGRATE_RECLAIMABLE, MIGRATE_UNMOVABLE, MIGRATE_RESERVE }, [MIGRATE_RESERVE] = { MIGRATE_RESERVE, MIGRATE_RESERVE, MIGRATE_RESERVE }, / Never used */ };
데이터 구조는 대부분 자체적으로 설명됩니다. 커널이 이동할 수 없는 페이지를 할당하려고 하지만 해당 목록이 비어 있으면 회수 가능한 페이지로 폴백한 다음 이동 가능한 페이지로, 마지막으로 비상 예비로 폴백합니다.
Global Variables and Auxiliary Functions¶
페이지 이동성 그룹화는 항상 커널로 컴파일되지만 여러 마이그레이션 목록에 분산될 수 있는 충분한 메모리가 시스템에 있는 경우에만 의미가 있습니다. 각 마이그레이션 목록에는 적절한 양의 메모리가 있어야 하므로 커널에는 ‘적합’이라는 개념이 필요합니다. 이는 두 개의 전역 변수 pageblock_order 및 pageblock_nr_pages에 의해 제공됩니다. 첫 번째는 ‘대형’으로 간주되는 할당 순서를 나타내며, pageblock_nr_pages는 이 할당 순서에 해당하는 페이지 수를 나타냅니다. 일반적으로 페이지 순서는 아키텍처에서 제공하는 경우 거대한 페이지의 순서로 선택됩니다.
<pageblock-flags.h> #define pageblock_order HUGETLB_PAGE_ORDER
IA-32 아키텍처에서 거대 페이지 크기는 4MiB이므로 각 거대 페이지는 1,024개의 일반 페이지로 구성되며 HUGETLB_PAGE_ORDER 는 10으로 정의됩니다. 이와 대조적으로 IA-64 아키텍처에서는 다양한 일반 페이지 크기와 거대 페이지 크기를 허용하므로 HUGETLB_PAGE_ORDER 값은 커널 구성에 따라 다릅니다. 아키텍처가 대용량 페이지를 지원하지 않는 경우 두 번째로 높은 할당 순서가 대량 주문으로 간주됩니다.
<pageblock-flags.h> #define pageblock_order (MAX_ORDER-1)
각 마이그레이션 유형에 최소한 하나의 대형 페이지 블록을 장착할 수 없는 경우 페이지 마이그레이션은 어떤 이점도 제공하지 않으므로 사용 가능한 메모리가 너무 적으면 커널에 의해 기능이 꺼집니다. 이는 영역 목록을 초기화하는 데 사용되는 build_all_zonelists 함수에서 확인됩니다 . 사용 가능한 메모리가 충분하지 않으면 전역 변수 page_group_by_mobility가 0으로 설정되고, 그렇지 않으면 1.18 로 설정됩니다. 커널은 주어진 할당이 어떤 마이그레이션 유형에 속하는지 어떻게 알 수 있습니까? 섹션 3.5.4에서 볼 수 있듯이 각 메모리 할당에 대한 세부 정보는 할당 마스크로 지정됩니다. 커널은 할당된 메모리가 이동 가능 (__GFP_MOVABLE) 또는 회수 가능 (__GFP_RECLAIMABLE)임을 알리는 두 개의 플래그를 제공합니다. 이러한 플래그 중 어느 것도 지정되지 않으면 할당은 이동할 수 없는 것으로 간주됩니다. 다음 보조 기능은 할당 플래그와 해당 마이그레이션 유형 간을 변환합니다.
<gfp.h> static inline int allocflags_to_migratetype(gfp_t gfp_flags) { if (unlikely(page_group_by_mobility_disabled)) return MIGRATE_UNMOVABLE; /* Group based on mobility */ return (((gfp_flags & __GFP_MOVABLE) != 0) << 1) | ((gfp_flags & __GFP_RECLAIMABLE) != 0); }
페이지 이동성이 비활성화된 경우 모든 페이지는 이동할 수 없는 영역에 유지됩니다. 그렇지 않으면 함수의 반환 값을 free_area.free_list의 배열 인덱스로 직접 사용할 수 있습니다. 마지막으로, 각 메모리 영역은 pageblock_nr_pages 페이지로 페이지 블록의 속성을 추적할 수 있는 특수 필드를 제공합니다. 이는 현재 페이지 이동 코드에서만 사용되므로 이전에는 이 기능을 도입하지 않았습니다. <mmzone.h> struct zone { … unsigned long *pageblock_flags; … }
초기화 중에 커널은 영역의 각 페이지 블록 그룹에 대해 pageblock_flags 에 NR_PAGEBLOCK_BITS 비트를 저장할 수 있는 충분한 공간이 있는지 자동으로 확인합니다. 현재 페이지 범위의 마이그레이션 유형을 나타내려면 3비트가 필요합니다. <pageblock-flags.h> /* Macro to aid the definition of ranges of bits / #define PB_range(name, required_bits) name, name ## _end = (name + required_bits) - 1 / Bit indices that affect a whole block of pages / enum pageblock_bits { PB_range(PB_migrate, 3), / 3 bits required for migrate types */ NR_PAGEBLOCK_BITS }; set_pageblock_ migrationtype은 페이지 로 제목이 지정된 페이지 블록에 대한 마이그레이션 유형을 설정하는 역할을 담당합니다 .
mm/page_alloc.c void set_pageblock_migratetype(struct page *page, int migratetype)
migrationtype 인수는 위에서 소개한 보조 함수 allocflags_to_ migrationtype 으로 구성할 수 있습니다 . 페이지의 마이그레이션 유형은 페이지가 버디 시스템에 있을 때만 사용할 수 있는 것이 아니라 항상 보존되어야 한다는 점에 유의하세요. 메모리가 해제되면 페이지를 적절한 마이그레이션 목록에 다시 넣어야 하며 이는 get_pageblock_ migrationtype을 사용하여 필요한 정보를 얻을 수 있기 때문에 가능합니다. 마지막으로, 마이그레이션 목록 전체에 걸친 페이지 배포의 현재 상태는 /proc/pagetypeinfo 에서 확인할 수 있습니다 .
Wolfgang@meitner> 고양이 /proc/pagetypeinfo페이지 블록 순서: 9 블록당 페이지: 512
Free pages count per migrate type at order 0 1 2 3 4 5 6 7 8 9 10 Node 0, zone DMA, type Unmovable 0 0 1 1 1 1 1 1 1 1 0 Node 0, zone DMA, type Reclaimable 0 0 0 0 0 0 0 0 0 0 0 Node 0, zone DMA, type Movable 3 5 6 3 5 2 2 2 0 0 0 Node 0, zone DMA, type Reserve 0 0 0 0 0 0 0 0 0 0 1 Node 0, zone DMA, type <NULL> 0 0 0 0 0 0 0 0 0 0 0 Node 0, zone DMA32, type Unmovable 44 37 29 1 2 0 1 1 0 1 0 Node 0, zone DMA32, type Reclaimable 18 29 3 4 1 0 0 0 1 1 0 Node 0, zone DMA32, type Movable 0 0 191 111 68 26 21 13 7 1 500 Node 0, zone DMA32, type Reserve 0 0 0 0 0 0 0 0 0 1 2 Node 0, zone DMA32, type <NULL> 0 0 0 0 0 0 0 0 0 0 0 Node 0, zone Normal, type Unmovable 1 5 1 0 0 0 0 0 0 0 0 Node 0, zone Normal, type Reclaimable 0 0 0 0 0 0 0 0 0 0 0 Node 0, zone Normal, type Movable 1 4 0 0 0 0 0 0 0 0 0 Node 0, zone Normal, type Reserve 11 13 7 8 3 4 2 0 0 0 0 Node 0, zone Normal, type <NULL> 0 0 0 0 0 0 0 0 0 0 0 Number of blocks type Unmovable Reclaimable Movable Reserve <NULL> Node 0, zone DMA 1 0 6 1 0 Node 0, zone DMA32 13 18 2005 4 0 Node 0, zone Normal 22 10 351 1 0
Initializing Mobility-Based Grouping¶
메모리 하위 시스템을 초기화하는 동안 memmap_init_zone은 페이지 처리를 담당합니다.메모리 영역의 인스턴스. 이 함수는 별로 흥미롭지 않은 몇 가지 표준 초기화를 수행합니다. 그러나 한 가지는 필수적입니다. 모든 페이지는 처음에 이동 가능하도록 표시되어 있습니다!
mm/page_alloc.c void __meminit memmap_init_zone(unsigned long size, int nid, unsigned long zone, unsigned long start_pfn, enum memmap_context context) { struct page *page; unsigned long end_pfn = start_pfn + size; unsigned long pfn; for (pfn = start_pfn; pfn < end_pfn; pfn++) { … if ((pfn & (pageblock_nr_pages-1))) set_pageblock_migratetype(page, MIGRATE_MOVABLE); … }
섹션 3.5.4에서 설명한 것처럼 커널은 페이지를 ‘도난’해야 할 때 큰 페이지 그룹을 선호합니다. 할당하려는 영역과 다른 마이그레이션 영역. 모든 페이지는 처음에이동 가능한 영역에서는 정기적이고 이동할 수 없는 커널 할당이 수행될 때 페이지를 훔쳐야 합니다.
당연히 부팅 중에 이동 가능한 할당이 너무 많이 수행되지 않으므로 할당자가 최대 크기의 블록을 선택하여 이동 가능한 목록에서 이동 불가능한 목록으로 전송할 가능성이 높습니다. 블록의 크기가 최대이므로 이동 가능한 영역에 조각화가 발생하지 않습니다! 전체적으로 이는 부팅 중에 수행되는(종종 전체 시스템 가동 시간 동안 지속되는) 커널 할당이 물리적 RAM에 분산되어 다른 할당 유형이 단편화되는 상황을 방지합니다. 이는 커널 할당의 가장 중요한 목표 중 하나입니다. 페이지 이동성 그룹화 프레임워크.
The Virtual Movable Zone¶
이동 순서에 따라 페이지를 그룹화하는 것은 물리적 메모리의 조각화를 방지하는 한 가지 가능한 방법이지만 커널은 이 문제를 해결하기 위한 또 다른 방법인 가상 영역 ZONE_MOVABLE을 추가로 제공합니다 . 이 메커니즘은 이동성 그룹화 프레임워크가 병합되기 전 릴리스인 커널 2.6.23 개발 중에 커널에 도입되었습니다. 이동성 그룹화와 달리 ZONE_MOVABLE 기능은 관리자가 명시적으로 활성화해야 합니다. 기본 아이디어는 간단합니다. 사용 가능한 실제 메모리는 이동 가능한 할당에 사용되는 영역과 이동 불가능한 할당에 사용되는 영역으로 분할됩니다. 이렇게 하면 이동 불가능한 페이지로 인해 이동 가능한 영역에 조각화가 발생하는 것을 자동으로 방지할 수 있습니다. 이는 커널이 두 경쟁자 사이에 사용 가능한 메모리를 분배하는 방법을 어떻게 결정해야 하는지에 대한 의문을 즉시 제기합니다. 분명히 이것은 열악한 커널에 너무 많은 것을 요구하므로 시스템 관리자가 결정을 내려야 합니다. 결국, 인간은 기계가 어떤 시나리오를 처리할지, 그리고 다양한 유형에 대한 예상 할당 분포가 무엇인지 훨씬 더 잘 예측할 수 있습니다.
Data Structures¶
kernelcore 매개변수를 사용하면 이동 불가능한 할당, 즉 회수나 마이그레이션이 불가능한 할당에 사용 되는 메모리 양을 지정할 수 있습니다. 남은 메모리는 이동 가능한 할당에 사용됩니다. 매개변수를 구문 분석한 후 결과는 전역 변수 필수_kernelcore에 저장됩니다. 이동식 메모리에 사용되는 메모리 양을 제어하기 위해 movablecore 매개변수를 사용하는 것도 가능합니다 . 이에 따라 필수_kernelcore 의 크기가 계산됩니다. 두 매개변수를 동시에 지정하면 커널은 이전과 같이 필수_kernelcore를 계산하고 계산된 값과 지정된 값 중 더 큰 값을 사용합니다. 아키텍처 및 커널 구성에 따라 새 영역 ZONE_MOVABLE은 고성능 메모리 또는 일반 메모리 영역 위에 위치합니다.
<mmzone.h> enum zone_type { … ZONE_NORMAL #ifdef CONFIG_HIGHMEM ZONE_HIGHMEM, #endif ZONE_MOVABLE, MAX_NR_ZONES };
시스템의 다른 모든 영역과 달리 ZONE_MOVABLE은 하드웨어에 중요한 메모리 범위와 연관되지 않습니다. 실제로 영역은 highmem 또는 일반 영역에서 가져온 메모리로 채워져 있으므로 다음에서는 ZONE_MOVABLE을 가상 영역 이라고 부릅니다 . 보조 함수 find_zone_movable_pfns_for_nodes는 ZONE_MOVABLE 에 들어가는 메모리 양을 계산하는 데 사용됩니다 . kernelcore 와 movablecore 매개변수가 모두 지정되지 않은 경우 find_zone_movable_pfns_for_nodes는 ZONE_MOVABLE을 비워 두고 메커니즘이 활성화되지 않습니다. 물리적 영역에서 가져와 ZONE_MOVABLE에 사용되는 페이지 수와 관련하여 두 가지 사항을 고려해야 합니다
이동 불가능한 할당을 위한 메모리는 모든 메모리 노드에 균등하게 분산됩니다. 가장 높은 영역의 메모리만 사용됩니다. 메모리가 많은 32비트 시스템에서는 일반적으로 ZONE_HIGHMEM 이 사용되지만 , 64비트 시스템에서는 ZONE_NORMAL 또는 ZONE_DMA32가 사용됩니다.
실제 계산은 다소 길지만 그다지 흥미롭지는 않으므로 자세히 고려하지는 않습니다. 중요한 것은 결과입니다.
가상 영역 ZONE_MOVABLE 에 대한 페이지를 가져오는 물리적 영역은 전역 변수 movable_zone.
각 노드에 대해 이후 메모리가 속한 이동 가능 영역의 페이지 프레임 ZONE_MOVABLE은 zone_movable_pfn[node_id] 에 있습니다 .
mm/page_alloc.c unsigned long __meminitdata zone_movable_pfn[MAX_NUMNODES];
커널은 이러한 페이지가 다음의 책임에 속하는 할당을 충족하는 데 사용되도록 보장합니다.ZONE_MOVABLE.
Implementation¶
지금까지 설명한 데이터 구조는 어떻게 사용됩니까? 페이지 마이그레이션 접근 방식과 마찬가지로 할당 플래그는 중요한 역할을 합니다. 이에 대해서는 아래 섹션 3.5.4에서 더 자세히 논의됩니다. 여기서는 모든 이동 가능한 할당이 __GFP_HIGHMEM 및 __GFP_MOVABLE 을 모두 지정해야 한다고만 말하면 충분합니다 . 커널은 할당 플래그에 의해 할당이 충족되는 영역을 결정하므로 해당 플래그가 설정되면 ZONE_MOVABLE을 선택할 수 있습니다. 이는 ZONE_MOVABLE을 버디 시스템에 통합하는 데 필요한 유일한 변경 사항입니다 ! 나머지는 아래에서 설명하는 모든 영역에서 작동하는 일반 루틴에 의해 수행됩니다.
3.5.3 Initializing the Zone and Node Data Structures¶
지금까지 우리는 커널이 아키텍처별 코드에서 시스템의 사용 가능한 메모리를 감지하는 방법만 살펴보았습니다. 더 높은 수준의 구조(영역 및 노드)와의 연결은 다음을 수행해야 합니다.
이 정보를 바탕으로 구성됩니다. 부팅 중에 다음 정보를 설정하려면 아키텍처가 필요하다는 점을 기억하세요.
max_zone_pfn 에 저장된 시스템 내 다양한 영역의 페이지 프레임 경계 정렬. 전역 변수 early_node_map에 저장된 노드 전체의 페이지 프레임 분포입니다 .
Managing Data Structure Creation¶
커널 2.6.10부터 이 정보를 버디 시스템이 예상하는 노드 및 영역 데이터 구조로 전송하기 위한 일반 프레임워크가 제공되었습니다. 이전에는 각 아키텍처가 자체적으로 구조를 설정해야 했습니다. 오늘은 앞서 언급한 간단한 구조를 설정하고 어려운 작업을 free_area_init_nodes에 맡기는 것으로 충분합니다. 그림 3-27은 프로세스 개요를 보여주고, 그림 3-28은 free_area_init_nodes에 대한 코드 흐름도를 보여줍니다.
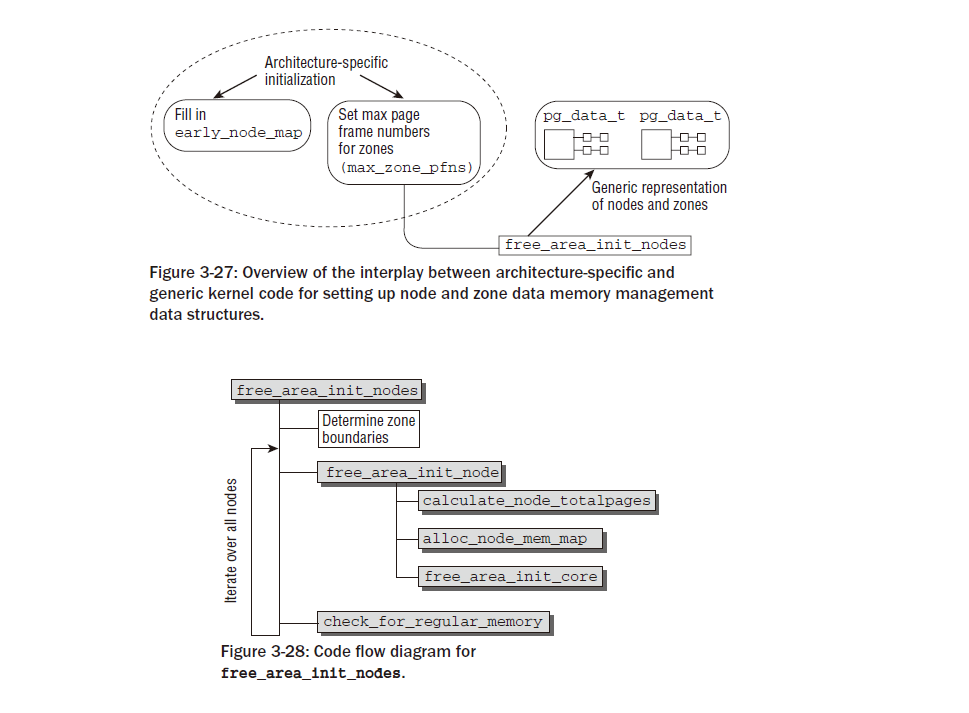
free_area_init_nodes는 먼저 아키텍처별 코드에서 제공하는 정보를 분석하고 다시 작성해야 합니다. 무엇보다도 zone_max_pfn 및 zone_min_pfn 에 지정된 기본 경계와 달리 사용할 수 있는 가장 낮은 페이지 프레임 수와 가장 높은 페이지 프레임 수 를 각 영역에 대해 얻어야 합니다. 정보를 저장하는 데 두 개의 전역 배열이 사용됩니다. mm/page_alloc.c static unsigned long __meminitdata arch_zone_lowest_possible_pfn[MAX_NR_ZONES]; static unsigned long __meminitdata arch_zone_highest_possible_pfn[MAX_NR_ZONES]
그러나 우선 free_area_init_nodes는 early_node_map 의 항목을 첫 번째 페이지 프레임을 기준으로 정렬합니다. start_pfn.
mm/page_alloc.c void __init free_area_init_nodes(unsigned long max_zone_pfn) { unsigned long nid; enum zone_type i; / Sort early_node_map as initialisation assumes it is sorted */ sort_node_map(); …
항목을 정렬하면 다음 작업이 더 쉬워지지만 특별히 복잡하지는 않으므로 sort_node_map을 추가로 검사할 필요가 없습니다. 커널은 함수에 사용되는 lib/sort.c 의 일반 힙 정렬 구현을 제공한다는 점에 유의하세요. max_zone_pfn 의 free_area_init_nodes 에 전달된 정보는 각 영역에 포함될 수 있는 최대 페이지 프레임 수를 기록합니다. free_area_init_nodes는 앞서 언급한 전역 변수의 각 영역에 대해 [low, high] 형식의 페이지 프레임 간격을 제공하여 이 정보를 보다 편리하게 표현하도록 준비합니다(0바이트로 이러한 변수의 초기화를 생략함). mm/page_alloc.c arch_zone_lowest_possible_pfn[0] = find_min_pfn_with_active_regions(); arch_zone_highest_possible_pfn[0] = max_zone_pfn[0]; for (i = 1; i < MAX_NR_ZONES; i++) { if (i == ZONE_MOVABLE) continue; arch_zone_lowest_possible_pfn[i] = arch_zone_highest_possible_pfn[i-1]; arch_zone_highest_possible_pfn[i] = max(max_zone_pfn[i], arch_zone_lowest_possible_pfn[i]); }
보조 함수 find_min_pfn_with_active_regions는 가장 낮은 등록 영역에 대해 등록된 가장 작은 사용 가능한 페이지 프레임을 찾는 데 사용됩니다. 이는 반드시 ZONE_DMA 일 필요는 없지만 , 예를 들어 머신에 DMA 메모리가 필요하지 않은 경우 ZONE_NORMAL 일 수도 있습니다 . 가장 작은 영역의 최대 페이지 프레임은 max_zone_pfn에서 제공하는 정보에서 직접 가져올 수 있습니다 .
그런 다음 다른 영역에 대한 간격은 간단한 방식으로 구성됩니다. n번째 영역 에 대한 가장 작은 페이지 프레임 은 이전 (n 1) 영역의 가장 큰 페이지 프레임입니다 . 현재 영역의 가장 큰 페이지 프레임은 max_zone_pfn에서 이미 사용 가능합니다.
mm/page_alloc.c arch_zone_lowest_possible_pfn[ZONE_MOVABLE] = 0; arch_zone_highest_possible_pfn[ZONE_MOVABLE] = 0; /* Find the PFNs that ZONE_MOVABLE begins at in each node */ … find_zone_movable_pfns_for_nodes(zone_movable_pfn);
ZONE_MOVABLE 은 가상 영역이고 실제 하드웨어 영역과 연결되지 않으므로 영역 경계는 항상 0으로 설정됩니다. 커널 명령줄 매개변수 kernelcore 또는 movablecore 중 하나라도 지정된 경우에만 존재한다는 점을 위에서 기억하세요 . 각 노드의 이동 가능 영역은 각 노드의 특정 영역의 특정 페이지 프레임 번호 이상에서 시작됩니다. 해당 숫자는 find_zone_movable_pfns_for_nodes에서 계산됩니다. 결정된 페이지 프레임 간격에 대한 일부 정보가 사용자에게 자랑스럽게 표시됩니다. 예를 들어 여기에는 다음이 포함됩니다(출력은 4GiB RAM이 있는 AMD64 시스템에서 수행됨).
root@meitner # dmesg … Zone PFN ranges: DMA 0 -> 4096 DMA32 4096 -> 1048576 Normal 1048576 -> 1245184
free_area_init_nodes 의 나머지 부분은 모든 노드를 반복하여 각각에 대한 데이터 구조를 설정합니다.
mm/page_alloc.c /* Print information about zones / … / Initialise every node / for_each_online_node(nid) { pg_data_t *pgdat = NODE_DATA(nid); free_area_init_node(nid, pgdat, NULL, find_min_pfn_for_node(nid), NULL); / Any memory on that node */ if (pgdat->node_present_pages) node_set_state(nid, N_HIGH_MEMORY); check_for_regular_memory(pgdat); } }
그러나 우선 free_area_init_nodes는 early_node_map 의 항목을 첫 번째 페이지 프레임을 기준으로 정렬합니다. start_pfn.
mm/page_alloc.c void __init free_area_init_nodes(unsigned long max_zone_pfn) { unsigned long nid; enum zone_type i; / Sort early_node_map as initialisation assumes it is sorted */ sort_node_map(); …
항목을 정렬하면 다음 작업이 더 쉬워지지만 특별히 복잡하지는 않으므로 sort_node_map을 추가로 검사할 필요가 없습니다. 커널은 함수에 사용되는 lib/sort.c 의 일반 힙 정렬 구현을 제공한다는 점에 유의하세요. max_zone_pfn 의 free_area_init_nodes 에 전달된 정보는 각 영역에 포함될 수 있는 최대 페이지 프레임 수를 기록합니다. free_area_init_nodes는 앞서 언급한 전역 변수의 각 영역에 대해 [low, high] 형식의 페이지 프레임 간격을 제공하여 이 정보를 보다 편리하게 표현하도록 준비합니다(0바이트로 이러한 변수의 초기화를 생략함).
mm/page_alloc.c arch_zone_lowest_possible_pfn[0] = find_min_pfn_with_active_regions(); arch_zone_highest_possible_pfn[0] = max_zone_pfn[0]; for (i = 1; i < MAX_NR_ZONES; i++) { if (i == ZONE_MOVABLE) continue; arch_zone_lowest_possible_pfn[i] = arch_zone_highest_possible_pfn[i-1]; arch_zone_highest_possible_pfn[i] = max(max_zone_pfn[i], arch_zone_lowest_possible_pfn[i]); }
보조 함수 find_min_pfn_with_active_regions는 가장 낮은 등록 영역에 대해 등록된 가장 작은 사용 가능한 페이지 프레임을 찾는 데 사용됩니다. 이는 반드시 ZONE_DMA 일 필요는 없지만 , 예를 들어 머신에 DMA 메모리가 필요하지 않은 경우 ZONE_NORMAL 일 수도 있습니다 . 가장 작은 영역의 최대 페이지 프레임은 max_zone_pfn에서 제공하는 정보에서 직접 가져올 수 있습니다 .
그런 다음 다른 영역에 대한 간격은 간단한 방식으로 구성됩니다. n번째 영역 에 대한 가장 작은 페이지 프레임 은 이전 (n 1) 영역의 가장 큰 페이지 프레임입니다 . 현재 영역의 가장 큰 페이지 프레임은 max_zone_pfn에서 이미 사용 가능합니다.
mm/page_alloc.c arch_zone_lowest_possible_pfn[ZONE_MOVABLE] = 0; arch_zone_highest_possible_pfn[ZONE_MOVABLE] = 0; /* Find the PFNs that ZONE_MOVABLE begins at in each node */ … find_zone_movable_pfns_for_nodes(zone_movable_pfn);
ZONE_MOVABLE 은 가상 영역이고 실제 하드웨어 영역과 연결되지 않으므로 영역 경계는 항상 0으로 설정됩니다. 커널 명령줄 매개변수 kernelcore 또는 movablecore 중 하나라도 지정된 경우에만 존재한다는 점을 위에서 기억하세요 . 각 노드의 이동 가능 영역은 각 노드의 특정 영역의 특정 페이지 프레임 번호 이상에서 시작됩니다. 해당 숫자는 find_zone_movable_pfns_for_nodes에서 계산됩니다. 결정된 페이지 프레임 간격에 대한 일부 정보가 사용자에게 자랑스럽게 표시됩니다. 예를 들어 여기에는 다음이 포함됩니다(출력은 4GiB RAM이 있는 AMD64 시스템에서 수행됨).
root@meitner # dmesg … Zone PFN ranges: DMA 0 -> 4096 DMA32 4096 -> 1048576 Normal 1048576 -> 1245184 …
free_area_init_nodes 의 나머지 부분은 모든 노드를 반복하여 각각에 대한 데이터 구조를 설정합니다.
mm/page_alloc.c /* Print information about zones / … / Initialise every node / for_each_online_node(nid) { pg_data_t *pgdat = NODE_DATA(nid); free_area_init_node(nid, pgdat, NULL, find_min_pfn_for_node(nid), NULL); / Any memory on that node */ if (pgdat->node_present_pages) node_set_state(nid, N_HIGH_MEMORY); check_for_regular_memory(pgdat); } }
코드는 모든 활성 노드를 반복하고 각 노드에 대한 데이터 구조 설정을 free_area_init_node에 위임합니다. 이 함수에는 사용 가능한 첫 번째 페이지 프레임이 매개변수로 필요하며 find_min_pfn_for_node는 early_node_map 배열 에서 이 정보를 추출합니다 .
node_present_pages 필드 에 표시된 대로 노드에 메모리가 장착되어 있으면 N_HIGH_MEMORY 플래그 를 설정하여 노드 비트맵에 반영됩니다 . 섹션 3.2.2에서 플래그(이름에도 불구하고)는 노드에 일반 또는 높은 메모리가 있음을 알리는 신호일 뿐이므로 check_for_regular_memory 는 ZONE_HIGHMEM 아래 영역의 페이지가 있는지 확인 하고 이에 따라 노드 비트맵에 N_NORMAL_MEMORY 플래그를 설정합니다.
Creating Data Structures for Each Node¶
영역 경계가 결정되면 free_area_init_nodes는 free_area_init_node를 호출하여 반복적으로 개별 영역에 대한 데이터 구조를 생성합니다 . 이 목적을 위해서는 몇 가지 도우미 기능이 필요합니다. Calculate_node_totalpages는 먼저 개별 영역의 페이지를 합산하여 노드의 총 페이지 수를 계산합니다. 연속 메모리의 경우 zones_size_init 에서 이를 수행할 수 있지만 , calculate_zone_totalpages는 영역의 홀도 고려합니다. 각 노드에서 발견된 페이지 수는 시스템이 부팅될 때 짧은 메시지로 출력됩니다. 아래 예는 RAM이 512MiB인 UMA 시스템에서 가져온 것입니다.
wolfgang@meitner> dmesg … On node 0 totalpages: 131056 …
alloc_node_mem_map은 간단하지만 매우 중요한 데이터 구조를 초기화하는 역할을 합니다. 위에서 언급한 것처럼 시스템의 모든 물리적 메모리 페이지에 대한 구조체 페이지 인스턴스가 있습니다 . 이 구조의 초기화는 alloc_node_mem_map에 의해 수행됩니다 .
mm/page_alloc.c static void __init_refok alloc_node_mem_map(struct pglist_data pgdat) { / Skip empty nodes */ if (!pgdat->node_spanned_pages) return; if (!pgdat->node_mem_map) { unsigned long size, start, end; struct page *map; start = pgdat->node_start_pfn & ~(MAX_ORDER_NR_PAGES - 1); end = pgdat->node_start_pfn + pgdat->node_spanned_pages; end = ALIGN(end, MAX_ORDER_NR_PAGES); size = (end - start) * sizeof(struct page); map = alloc_remap(pgdat->node_id, size); if (!map) map = alloc_bootmem_node(pgdat, size); pgdat->node_mem_map = map + (pgdat->node_start_pfn - start); } if (pgdat == NODE_DATA(0)) mem_map = NODE_DATA(0)->node_mem_map; }
페이지가 없는 빈 노드는 당연히 건너뛸 수 있습니다. 아키텍처별 코드로 메모리 맵이 아직 설정되지 않은 경우(예: IA-64 시스템에서 발생할 수 있음) 노드와 연결된 구조체 페이지 의 모든 인스턴스에 필요한 메모리를 할당해야 합니다. 개별 아키텍처는 이러한 목적을 위해 특정 기능을 제공할 수 있습니다. 그러나 이는 현재 메모리 구성이 불연속적인 IA-32의 경우에만 해당됩니다. 다른 모 든 구성에서는 일반 부팅 메모리 할당자가 할당을 수행하는 데 사용됩니다. 모든 계산이 제대로 작동하려면 코드가 메모리 맵을 버디 시스템의 최대 할당 순서에 맞춰 정렬합니다. 이 공간에 대한 포인터는 pglist_data 인스턴스뿐만 아니라 전역 변수 mem_map 에도 보관 됩니다. 방금 검사한 노드가 시스템의 0번째 노드인 경우(항상 메모리 노드가 하나만 있는 시스템의 경우)입니다. mem_map 은 메모리 관리에 대한 설명에서 자주 접하게 될 전역 배열입니다.
mm/memory.c struct page *mem_map;
영역 데이터 구조의 초기화와 관련된 무거운 작업 은 노드의 모든 영역을 차례로 반복하는 free_area_init_core 에 의해 수행됩니다 .
mm/page_alloc.c static void __init free_area_init_core(struct pglist_data *pgdat, unsigned long *zones_size, unsigned long *zholes_size) { enum zone_type j; int nid = pgdat->node_id; unsigned long zone_start_pfn = pgdat->node_start_pfn; … for (j = 0; j < MAX_NR_ZONES; j++) { struct zone *zone = pgdat->node_zones + j; unsigned long size, realsize, memmap_pages; size = zone_spanned_pages_in_node(nid, j, zones_size); realsize = size - zone_absent_pages_in_node(nid, j, zholes_size); …
영역의 실제 크기는 스팬된 페이지 수를 구멍 수로 수정하여 얻습니다. 두 수량 모두 두 개의 도우미 함수에 의해 계산되므로 더 자세히 논의하지는 않겠습니다. 그 복잡성은 당연히 선택한 메모리 모델과 구성 옵션에 따라 다르지만 궁극적으로 모든 변형은 예상치 못한 놀라움을 제공하지 않습니다.
mm/page_alloc.c … if (!is_highmem_idx(j)) nr_kernel_pages += realsize; nr_all_pages += realsize; zone->spanned_pages = size; zone->present_pages = realsize; … zone->name = zone_names[j]; … zone->zone_pgdat = pgdat;
/* Initialize zone fields to default values, * and call helper functions */ … }
커널은 두 개의 전역 변수를 사용하여 시스템에 존재하는 페이지 수를 추적합니다. nr_kernel_pages는 모든 ID 매핑 페이지를 계산하는 반면 nr_all_pages 는 높은 메모리 페이지도 포함합니다.
free_area_init_core 의 나머지 부분의 작업은 영역 구조 의 목록 헤드를 초기화 하고 다양한 구조 멤버를 0으로 초기화하는 것입니다. 특히 흥미로운 것은 호출되는 두 가지 도우미 함수입니다.
zone_pcp_init는 다음 섹션에서 광범위하게 설명하는 것처럼 영역에 대한 CPU별 캐시를 초기화합니다.
it_currently_empty_zone은 free_area 목록을 초기화 하고 해당 영역에 속한 페이지의 모든 페이지 인스턴스를 초기 기본값으로 설정 합니다. 위에서 설명한 memmap_init_zone은 영역의 페이지를 초기화하기 위해 호출됩니다. 또한 처음에는 모든 페이지가 MIGRATE_MOVABLE 에 귀속된다는 점을 기억하세요 . 또한 무료 목록은 zone_init_free_lists에서 초기화됩니다.
}
용 가능한 페이지 수 (nr_free) 는 현재 여전히 0으로 정의되어 있으며 이는 분명히 실제 상황을 반영하지 않습니다. bootmem 할당자가 비활성화되고 정상적인 버디 할당이 적용될 때까지 올바른 값이 설정되지 않습니다.
3.5.4 Allocator API¶
버디 시스템에 대한 인터페이스에 관한 한 NUMA 또는 UMA 아키텍처가 사용되는지 여부는 호출 구문이 둘 다 동일하기 때문에 차이가 없습니다. 모든 함수의 공통점은 페이지가 2의 정수 거듭제곱으로만 할당될 수 있다는 사실입니다. 이러한 이유로 원하는 메모리 크기는 C 표준 라이브러리의 malloc 함수나 bootmem 할당자에서처럼 매개변수로 지정되지 않습니다 . . 대신 할당 순서를 지정해야 하며 이로 인해 버디 시스템이 버디 시스템을 기반으로 하는 슬랩 할당자(또는 슬러브 또는 슬롭 할당자)의 구성입니다(자세한 내용은 섹션 3.6 참조)
oc_pages(mask, order)는 2차 페이지를 할당 하고 예약된 블록의 시작을 나타내는 구조체 페이지 의 인스턴스를 반환합니다 . alloc_page(mask)는 한 페이지만 요청한 경우 order = 0 에 대한 더 짧은 표기법입니다 .
Allocator API¶
버디 시스템에 대한 인터페이스에 관한 한 NUMA 또는 UMA 아키텍처가 사용되는지 여부는 호출 구문이 둘 다 동일하기 때문에 차이가 없습니다. 모든 함수의 공통점은 페이지가 2의 정수 거듭제곱으로만 할당될 수 있다는 사실입니다. 이러한 이유로 원하는 메모리 크기는 C 표준 라이브러리의 malloc 함수나 bootmem 할당자에서처럼 매개변수로 지정되지 않습니다 . . 대신 할당 순서를 지정해야 하며 이로 인해 버디 시스템이 디 시스템을 기반으로 하는 슬랩 할당자(또는 슬러브 또는 슬롭 할당자)의 구성입니다(자세한 내용은 섹션 3.6 참조). alloc_pages(mask, order)는 2차 페이지를 할당 하고 예약된 블록의 시작을 나타내는 구조체 페이지 의 인스턴스를 반환합니다 . alloc_page(mask)는 한 페이지만 요청한 경우 order = 0 에 대한 더 짧은 표기법입니다 .
get_zeroed_page(mask)는 페이지를 할당하고 페이지 인스턴스를 반환하지만 페이지를 0으로 채웁니다(다른 모든 함수의 경우 페이지 내용은 할당 후에 정의되지 않습니다). __get_free_pages(mask,order) 및 __get_free_page(mask) 는 __get_free_pages(mask) 와 동일한 방식으로 작동합니다. 위의 함수는 페이지 인스턴스 대신 예약된 메모리 청크의 가상 주소를 반환합니다 .
get_dma_pages(gfp_mask,order)를 사용하면 DMA에 적합한 페이지를 얻을 수 있습니다.
요청을 충족할 수 있는 메모리가 부족하여 할당이 실패하는 경우 위의 모든 함수는 null 포인터 (alloc_pages 및 alloc_page) 또는 값 0 (get_zeroed_page, __get_free_pages 및 __get_free_page)을 반환합니다. 따라서 커널은 모든 할당 시도 후에 반환된 결과를 확인해야 합니다 . 이 관행은 잘 설계된 사용자 영역 응용 프로그램과 다르지 않지만 커널에서 검사를 무시하면 훨씬 더 심각한 오류가 발생합니다. 커널은 버디 시스템 기능 외에도 다른 메모리 관리 기능을 제공합니다. 이는 버디 시스템의 기초로 사용되지만 버디 할당자 자체에는 속하지 않는 레이어를 기반으로 구축됩니다. 이러한 함수는 vmalloc 및 vmalloc_32 이며 페이지 테이블을 사용하여 연속되지 않은 메모리를 커널 주소 공간에 매핑하여 연속된 것처럼 보이도록 합니다. 전체 페이지보다 작은 메모리 영역을 예약하는 kmalloc 유형 의 함수 세트도 있습니다 . 구현에 대해서는 이 장의 뒷부분에서 별도로 설명합니다.
메모리에 더 이상 필요하지 않은 페이지를 커널에 반환하기 위해 약간 다른 네 가지 함수가 정의됩니다. free_page(struct page*) 및 free_pages(struct page*, order)는 메모리 관리에 1~ 2차 페이지를 반환합니다. 메모리 영역의 시작은 해당 영역의 첫 번째 페이지 인스턴스 에 대한 포인터를 통해 표시됩니다 . free_page(addr) , __free_pages(addr, order)는 방금 언급한 함수와 동일한 방식으로 동작하지만 , 반환할 메모 리 영역을 선택하기 위해 페이지 인스턴스 대신 가상 메모리 주소를 사용합니다 .
AllocationMasks¶
모든 기능에 필수인 마스크 매개변수 의 의미는 무엇입니까 ? 섹션 3.2.1에서 알 수 있듯이 Linux는 메모리를 영역으로 나눕니다. 커널은 메모리 할당을 위해 페이지를 가져올 영역을 지정하기 위해 영역 수정자 (마스크의 최하위 4비트에 정의됨)를 제공합니다. <gfp.h> /* Zone modifiers in GFP_ZONEMASK (see linux/mmzone.h - low three bits) / #define __GFP_DMA ((__force gfp_t)0x01u) #define __GFP_HIGHMEM ((__force gfp_t)0x02u) #define __GFP_DMA32 ((__force gfp_t)0x04u) … #define __GFP_MOVABLE ((__force gfp_t)0x100000u) / Page is movable */
이러한 상수는 대체 목록 생성에 대해 설명하는 섹션 3.4.1에서 익숙합니다. 약어 GFP는 무료 페이지 확보를 의미합니다 . __GFP_MOVABLE은 물리적 메모리 영역을 나타내지는 않지만 특수 가상 영역 ZONE_MOVABLE에서 할당이 이행되어야 함을 커널에 지시합니다.
흥미롭게도 할당의 주요 부담은 이 영역에 있지만 __GFP_NORMAL 상수는 없습니다 . 커널은 주어진 할당 플래그와 호환되는 가장 높은 메모리 영역을 계산하는 함수를 제공하여 이 사실을 고려합니다. 그러면 이 영역과 그 아래 영역에서 할당이 이루어질 수 있습니다. mm/page_alloc.c static inline enum zone_type gfp_zone(gfp_t flags) { #ifdef CONFIG_ZONE_DMA if (flags & __GFP_DMA) return ZONE_DMA; #endif #ifdef CONFIG_ZONE_DMA32 if (flags & __GFP_DMA32) return ZONE_DMA32; #endif if ((flags & (__GFP_HIGHMEM | __GFP_MOVABLE)) == (__GFP_HIGHMEM | __GFP_MOVABLE)) return ZONE_MOVABLE; #ifdef CONFIG_HIGHMEM if (flags & __GFP_HIGHMEM) return ZONE_HIGHMEM; #endif return ZONE_NORMAL; } 영역 수정자가 해석되는 방식이 즉시 직관적으로 나타나지 않을 수 있으므로 표 3-7은 DMA 및 DMA32의 영역이 동일한 경우 함수 결과의 예를 보여줍니다. __GFP_MOVABLE 수정자가 다음에 설정되어 있지 않다고 가정합니다 . __GFP_DMA 및 __GFP_HIGHMEM이 모두 설정되지 않은 경우 ZONE_NORMAL이 먼저 검색되고 그 다음 ZONE_DMA가 검색됩니다. __GFP_HIGHMEM이 설정되고 __GFP_DMA가 설정되지 않은 경우 결과적으로 ZONE_HIGHMEM부터 시작하여 세 영역이 모두 스캔됩니다. __GFP_DMA가 설정된 경우 __GFP_HIGHMEM 설정 여부는 커널과 관련이 없습니다 . 두 경우 모두 ZONE_DMA 만 사용됩니다. __GFP_HIGHMEM 과 __GFP_DMA 를 동시에 사용하는 것은 의미가 없기 때문에 이는 합리적입 니다 . Highmem은 결코 DMA에 적합하지 않습니다.
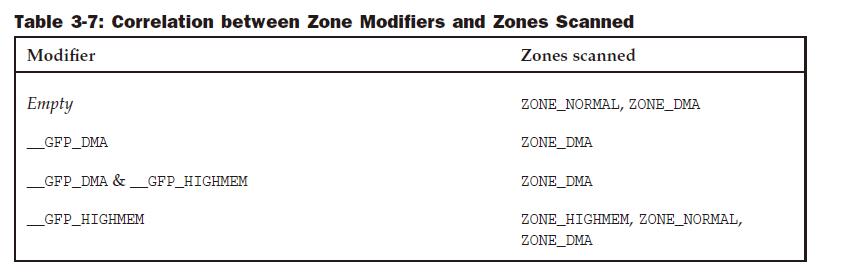
__GFP_MOVABLE 설정은 __GFP_HIGHMEM 과 함께 지정되지 않는 한 커널의 결정에 영향을 미치지 않습니다 . 이 경우 메모리 요청을 충족하기 위해 특수 가상 영역 ZONE_MOVABLE이 사용됩니다. 이 동작은 설명된 대로 커널의 조각화 방지 전략에 필수적입니다. 영역 수정자 외에 몇 가지 플래그를 마스크에 설정할 수 있습니다. 그림 3-29는 마스크의 레이아웃과 비트 위치와 관련된 상수를 보여줍니다. __GFP_DMA32는 다른 위치에 있을 수 있으므로 여러 번 나타납니다.

영역 수정자와 달리 추가 플래그는 메모리를 할당할 수 있는 RAM 세그먼트를 제한 하지 않지만 할당자의 동작을 변경합니다. 예를 들어, 여유 메모리에 대한 검색이 얼마나 적극적으로 수행되는지 수정합니다. 다음 플래그는 커널에 정의되어 있습니다.
<gfp.h> /* Action modifiers - doesn’t change the zoning / #define __GFP_WAIT ((__force gfp_t)0x10u) / Can wait and reschedule? / #define __GFP_HIGH ((__force gfp_t)0x20u) / Should access emergency pools? / #define __GFP_IO ((__force gfp_t)0x40u) / Can start physical IO? / #define __GFP_FS ((__force gfp_t)0x80u) / Can call down to low-level FS? / #define __GFP_COLD ((__force gfp_t)0x100u) / Cache-cold page required / #define __GFP_NOWARN ((__force gfp_t)0x200u) / Suppress page allocation failure warning / #define __GFP_REPEAT ((__force gfp_t)0x400u) / Retry the allocation. Might fail / #define __GFP_NOFAIL ((__force gfp_t)0x800u) / Retry for ever. Cannot fail / #define __GFP_NORETRY ((__force gfp_t)0x1000u)/ Do not retry. Might fail / #define __GFP_NO_GROW ((__force gfp_t)0x2000u)/ Slab internal usage / #define __GFP_COMP ((__force gfp_t)0x4000u)/ Add compound page metadata / #define __GFP_ZERO ((__force gfp_t)0x8000u)/ Return zeroed page on success / #define __GFP_NOMEMALLOC ((__force gfp_t)0x10000u) / Don’t use emergency reserves / #define __GFP_HARDWALL ((__force gfp_t)0x20000u) / Enforce hardwall cpuset memory allocs / #define __GFP_THISNODE ((__force gfp_t)0x40000u)/ No fallback, no policies / #define __GFP_RECLAIMABLE ((__force gfp_t)0x80000u) / Page is reclaimable / #define __GFP_MOVABLE ((__force gfp_t)0x100000u) / Page is movable */
표시된 상수 중 일부는 드문 경우에만 사용되므로 이에 대해서는 논의하지 않겠습니다. 가장 중요한 상수의 의미는 다음과 같습니다.
__GFP_WAIT는 메모리 요청이 중단될 수 있음을 나타냅니다. 즉, 스케줄러는 요청 중에 다른 프로세스를 자유롭게 선택할 수 있으 며, 그렇지 않으면 더 중요한 이벤트로 인해 요청이 중단될 수 있습니다. 할당자는 메모리가 반환되기 전에 큐에서 이벤트를 기다리는 것(그리고 프로세스를 절전 모드로 전환하는 것)도 허용됩니다.
__GFP_HIGH 는 요청이 매우 중요한 경우, 즉 커널에 긴급하게 메모리가 필요한 경우 설정됩니다. 이 플래그는 메모리 할당 실패가 커널에 큰 영향을 미쳐 시스템 안정성에 위협이 되거나 심지어 시스템 충돌까지 초래할 수 있는 경우 항상 사용됩니다.
이름의 유사성에도 불구하고 __GFP_HIGH는 __GFP_HIGHMEM 과 아무 관련이 없으므로 혼동해서는 안 됩니다.
__GFP_IO는 커널이 새로운 메모리를 찾으려고 시도하는 동안 I/O 작업을 수행할 수 있음을 지정합니다. 실제로 이는 커널이 메모 리 할당 중에 페이지를 교체하기 시작하면 이 플래그가 설정된 경우에만 선택한 페이지가 하드 디스크에 기록될 수 있음을 의미합니다. __GFP_FS를 사용하면 커널이 VFS 작업을 수행할 수 있습니다. 이러한 종류의 상호 작용으로 인해 끝없는 재귀 호출이 발생할 수 있으므로 VFS 계층과 연결된 커널 계층에서는 이를 방지해야 합니다. __GFP_COLD는 CPU 캐 시에 상주 하지 않는 ‘콜드’ 페이지 할당이 필요한 경우 설정됩니다 . __GFP_NOWARN은 할당이 실패할 경우 커널 실패 경 고를 표시하지 않습니다. 오카가 거의 없어요 이 플래그가 유용할 때 유용합니다. __GFP_REPEAT는 실패한 할당을 자동으로 다시 시도하지만 몇 번 시도한 후에는 중지됩니다. __GFP_NOFAIL은 성공할 때까지 실패한 할당을 다시 시도합니다. __GFP_ZERO는 할당이 성공하면 0바이트로 채워진 페이지를 반환합니다. __GFP_HARDWALL 은 NUMA 시스템에서만 의미가 있습니다. 프로세스에 할당된 CPU와 연결된 노드로 메모리 할당을 제한합니다. 프로세스가 모든 CPU에 서 실행되도록 허용된 경우(기본값) 플래그는 의미가 없습니다. 프로세스가 실행될 수 있는 CPU가 제한된 경우에만 명시적인 효과가 있습니다. __GFP_THISNODE는 NUMA 시스템에서만 의미가 있습니다. 비트가 설정된 경우 다른 노드로의 폴백은 허용되지 않으며 메모리는 현재 노드 또는 명시적으로 지정된 노드에 할당되는 것이 보장됩니다
__GFP_RECLAIMABLE 및 __GFP_MOVABLE 은 페이지 이동 메커니즘에 필요합니다. 이름에서 알 수 있듯이 할당된 메모리가 각각 회수 가능하거나 이동 가능함을 표시합니다. 이는 페이지를 가져올 freelist의 하위 목록에 영향을 줍니다.
플래그는 조합되어 사용되며 단독으로는 거의 사용되지 않으므로 커널은 이를 다양한 표준 상황에 적합한 플래그를 포함하는 그룹으로 분류합니다. 가능하다면 메모리 관리 자체 이외의 메모리 할당에는 항상 다음 그룹 중 하나를 사용해야 합니다. (이 요구 사항은 미리 정의된 그룹의 이름이 내부 데이터 및 커널 소스의 정의에 대한 일반적인 규칙인 이중 밑줄로 시작하지 않는다는 사실로 강화됩니다.) <gfp.h> #define GFP_ATOMIC (__GFP_HIGH) #define GFP_NOIO (__GFP_WAIT) #define GFP_NOFS (__GFP_WAIT | __GFP_IO) #define GFP_KERNEL (__GFP_WAIT | __GFP_IO | __GFP_FS) #define GFP_USER (__GFP_WAIT | __GFP_IO | __GFP_FS | __GFP_HARDWALL) #define GFP_HIGHUSER (__GFP_WAIT | __GFP_IO | __GFP_FS | __GFP_HARDWALL | __GFP_HIGHMEM) #define GFP_HIGHUSER_MOVABLE (__GFP_WAIT | __GFP_IO | __GFP_FS | __GFP_HARDWALL | __GFP_HIGHMEM | __GFP_MOVABLE) #define GFP_DMA __GFP_DMA #define GFP_DMA32 __GFP_DMA32
처음 세 조합의 의미는 명확합니다. GFP_ATOMIC은 어떤 계정에서도 중단되지 않고 메모리의 ‘비상 예비’를 활용할 수도 있는 원자 할당에 사용됩니다. GFP_NOIO 및 GFP_NOFS는 각각 I/O 작업과 VFS 계층에 대한 액세스를 명시적으로 제외하지만 __GFP_WAIT가 설정되어 있기 때문에 중단될 수 있습니다.
GFP_KERNEL 및 GFP_USER 는 각각 커널 및 사용자 할당에 대한 기본 설정입니다. 이들의 실패는 시스템 안정성에 즉각적인 위협이 되지 않습니다. GFP_KERNEL은 커널 소스에서 가장 자주 사용되는 플래그입니다.
GFP_HIGHUSER 는 사용자 공간을 대신하여 사용되는 GFP_USER 의 확장입니다 . 또한 더 이상 직접 매핑할 수 없는 대 용량 메모리 영역의 사용도 허용합니다. 사용자 프로세스의 주소 공간은 항상 비선형 페이지 테이블 할당을 통해 구성되므로 highmem 페이지를 사용하는 데에는 단점이 없습니다. GFP_HIGHUSER_MOVABLE 은 목적상 GFP_HIGHUSER 와 유사 하지만 가상 영역 ZONE_MOVABLE에서 할당이 충족됩니다 .
GFP_DMA 는 DMA 할당에 사용되며 현재 __GFP_DMA 의 간단한 동의어입니다 . GFP_DMA32 는 마찬가지로 __GFP_GMA32의 동의어입니다
AllocationMacros¶
플래그, 영역 수정자 및 다양한 할당 기능을 사용하여 커널은 매우 유연한 메모리 예약 시스템을 제공합니다. 그럼에도 불구하고 모든 인터페이스 함수는 단일 기본 함수 (alloc_pages_node)로 역추적될 수 있습니다. 단일 페이지를 예약하는 alloc_page 및 __get_free_page 는 alloc_pages와 마찬가지로 매크로의 도움으로 정의됩니다.
<gfp.h> #define alloc_page(gfp_mask) alloc_pages(gfp_mask, 0) … #define __get_free_page(gfp_mask) __get_free_pages((gfp_mask),0) <mm.h> #define __get_dma_pages(gfp_mask, order) __get_free_pages((gfp_mask) | GFP_DMA,(order))
get_zeroed_page 구현도 특별히 어렵지 않습니다. __GFP_ZERO 플래그 와 함께 사용되는 alloc_pages는 이미 null 바이트로 채워진 페이지를 예약합니다. — 페이지와 관련된 메모리 영역의 주소만 반환하면 됩니다.
모든 아키텍처에서 구현해야 하는 Clear_page 표준 함수는 alloc_pages 가 페이지를 null 바이트로 채우는 데 도움 이 됩니다.19 __get_free_pages는 alloc_pages에 액세스하고 , alloc_pages 는 차례로 alloc_pages_node에 의존합니다.
<gfp.h> #define alloc_pages(gfp_mask, order) alloc_pages_node(numa_node_id(), gfp_mask, order) mm/page_alloc.c fastcall unsigned long __get_free_pages(gfp_t gfp_mask, unsigned int order) { struct page * page; page = alloc_pages(gfp_mask, order); if (!page) return 0; return (unsigned long) page_address(page); }
이 경우 alloc_pages 에서 반환된 페이지 인스턴스가 도우미 함수 page_address를 사용하여 메모리 주소로 변환되어야 하기 때문에 매크로 대신 적절한 함수가 사용됩니다 . 이 시점에서는 함수가 전달된 페이지 인스턴스와 연관된 페이지의 선형 메모리 주소를 생성한다는 것을 아는 것만으로도 충분합니다. 이는 highmem 페이지에 문제가 있으므로 섹션 3.5.7에서 해당 기능에 대해 자세히 설명합니다. 이로써 모든 API 함수가 공통 기본 함수인 alloc_pages 로 통합되었습니다.그림 3-30은 그래픽 개요를 통해 다양한 기능 간의 관계를 보여줍니다.
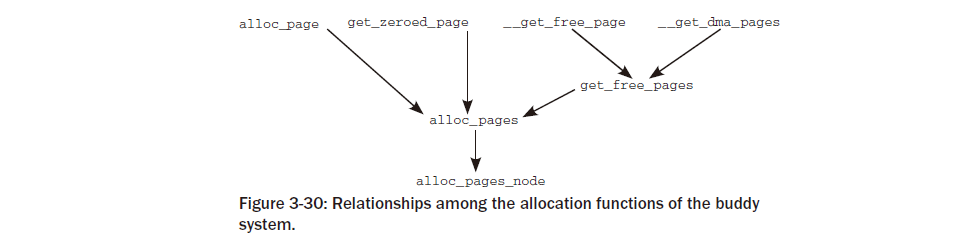
- page_cache_alloc 및 page_cache_alloc_cold는 __GFP_COLD 수정자를 적절하게 설정하여 각각 캐시 웜 페이지와 캐시 콜드
- 페이지를 생성하는 편의 함수입니다 .
마찬가지로, 메모리 비우기 함수는 다른 매개변수로 호출되는 중앙 함수 (__free_pages) 로 축소될 수 있습니다.
<gfp.h> #define __free_page(page) __free_pages((page), 0) #define free_page(addr) free_pages((addr),0)
free_pages 와 __free_pages 사이의 관계는 가상 주소가 먼저 구조체 페이지 에 대한 포인터로 변환되어야 하기 때문에 매크로 대신 함수를 통해 설정됩니다 .
mm/page_alloc.c void free_pages(unsigned long addr, unsigned int order) { if (addr != 0) { __free_pages(virt_to_page(addr), order); } }
virt_to_page는 가상 메모리 주소를 페이지 인스턴스에 대한 포인터로 변환합니다. 기본적으로 이는 위에서 소개한 page_address 도우미 함수 의 반대입니다 . 그림 3-31에서는 다양한 메모리 해제 기능 간의 관계를 그래픽 개요로 요약합니다.